Seda tüüpi ühendus fikseerib keha mõne punkti nii, et see ei saaks ruumis liigutada. Sellisteks ühendusteks on näiteks kuuljalg, millega kaamera kinnitatakse statiivile (joon. 16, b) ja laager koos tõukejõuga (joon. 16, c). Kuulliigendi või tõukelaagri reaktsioonil R võib ruumis olla mis tahes suund. Selle jaoks ei ole ette teada ei reaktsioonimoodul R ega nurgad, mille see moodustab telgedega x, y, z.
5. Varras.
Laske mõnes konstruktsioonis, ühenduseks on varras AB, otstest hingedega kinnitatud (joon. 17). Oletame, et varda kaalu võrreldes tajutava koormusega võib tähelepanuta jätta. Siis mõjuvad vardale ainult kaks hingedele A ja B rakenduvat jõudu.Kui aga varras AB on tasakaalus, siis vastavalt aksioomile 1 peavad punktides A ja B rakendatavad jõud olema suunatud mööda üht sirget, s.t. piki varda telge. Järelikult töötab otstest koormatud varras, mille raskust võib nende koormustega võrreldes tähelepanuta jätta, ainult pinges või surves. Kui selline varras on side, siis suunatakse varda reaktsioon piki varda telge.
6. Liigutatav pöördtugi
Liigutatav hingedega tugi (joon. 18, tugi A) takistab keha liikumist ainult toe libisemistasandiga risti olevas suunas. Sellise toe reaktsioon on suunatud piki normaalset pinnale, millel liikuva toe rullikud toetuvad.
7. Fikseeritud hingetugi
Fikseeritud liigendtugi (joon. 18, tugi B). Sellise toe reaktsioon läbib liigendtelge ja sellel võib olla mis tahes suund joonise tasapinnas. Ülesannete lahendamisel kujutame reaktsiooni selle komponentide kaupa ja piki koordinaattelgede suundi. Kui leiame ülesande lahendades, määrab reaktsioon sama; modulo
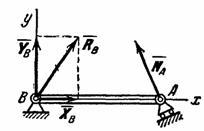
Kasutatakse joonisel 18 näidatud kinnitusmeetodit, et talas AB ei tekiks lisapingeid, kui selle pikkus muutub temperatuurimuutuste või painde tõttu.
Pange tähele, et kui tala tugi A (joonis 18) on samuti fikseeritud, on tala mistahes lameda jõudude süsteemi mõjul staatiliselt määramatu, kuna siis siseneb kolme tundmatu reaktsiooni ,,, tasakaalu võrrandid.
8. Fikseeritud muljumise tugi või jäik otsak (joonis 19).
Sel juhul mõjub tala sisseehitatud otsale tugitasandite küljelt hajutatud reaktsioonijõudude süsteem. Eeldades, et need jõud on viidud keskpunkti A, saame need asendada ühe selles keskuses rakendatud tundmatu jõuga ja paariga, mille hetkeks on ette teada. Silumit saab omakorda esindada selle komponentidega. Seega on fikseeritud muljumise toe reaktsiooni leidmiseks vaja määrata kolm tundmatut suurust, u. Kui kuskil punktis B sellise tala alla tuua veel üks tugi, siis muutub tala staatiliselt määramatuks.

Teiste konstruktsioonide sidestusreaktsioonide määramisel tuleb kindlaks teha, kas see võimaldab liikuda mööda kolme üksteisega risti olevat telge ja pöörata ümber nende telgede. Kui see takistab mis tahes liikumist - näidake vastavat jõudu, kui see takistab pöörlemist - paar vastava momendiga.
Mõnikord on vaja uurida mittejäikade kehade tasakaalu. Sel juhul kasutame eeldust, et kui see mittejäik keha on jõudude mõjul tasakaalus, siis võib seda kõiki staatika reegleid ja meetodeid kasutades käsitleda jäiga kehana.
Tootekirjeldus
Kangi mehhanismid. Osa 2. Pöördliigendid.
Iga kangimehhanismi üks peamisi elemente on selle lülide pöörlemine. Sel juhul võib kõik liigendühendused jagada kahte tüüpi:
- liigutatava teljega liigendliigend, mille moodustavad kaks kangimehhanismi liikuvat lüli (väntvõll - voodi, väntvõll - ühendusvarras, ühendusvarras - liugur, ühendusvarras - hoob),
− fikseeritud teljega pöördliigend, mis on moodustatud hoovamehhanismi lülist ja hammaslatsist (kiikhoob - voodi, kang - voodi).
Liigendliigendite nii liikuvate kui ka fikseeritud telgede konstruktsiooni mõjutavad oluliselt kangmehhanismi tüüp ja selle funktsionaalne otstarve, mis määravad selle lülide, sealhulgas liigendliigendite töötingimused. Pöördliigendi töötingimused määravad lülide liikumiskiiruse iseloom ja suurus ning neile mõjuvad koormused, mis lõppkokkuvõttes määravad ära pöördeliigendi konstruktsiooni. Pöördliigendile mõjuvate koormuste suuruse põhjal võib need jagada kahte tüüpi, mille konstruktsioon erineb oluliselt, need on:
- mittejõuliste mehhanismide pöördliigendid,
- jõumehhanismide hingedega ühendused.
Tuleb märkida, et teist tüüpi pöördliigendid on kõige kriitilisemad ja seetõttu seatakse nende konstruktsioonile kõrgemad nõuded, sealhulgas nendes sisalduvate osade materjalile ja kuumtöötlusele, samuti nende määrimisele.
Vajaliku tugevusega pöördliigend, mis võimaldab tajuda talle mõjuvaid koormusi, peab olema piisava kulumiskindlusega, et tagada selle toimimine mehhanismi kasutusea või kehtestatud garantiiperioodi jooksul, mida saab tagada tühimiku tekitamisega. ühenduskohas, mis tagab vuugi normaalse töö ja garanteeritud määrdeainete juurdevoolu, mis moodustab ühenduse hõõrduvate osade - telje ja puksi - vahele vajaliku õlikihi.
Mittejõuliste ühendusmehhanismide pöördliigendid.
Mittejõuliste hoobmehhanismide hulka kuuluvad perioodiliselt töötavate masinate ja tehnoloogiliste seadmete abimehhanismid, mis liiguvad madalal kiirusel ja ei koge töötamise ajal dünaamilisi koormusi, seetõttu on nende liigendliigendite kulumistundlikkus töö ajal reeglina ebaoluline. ei määra stabiilset pikaajalist talitlust.mehhanism tervikuna. Selliste hoobade liigendühenduste põhinõue on neis tekkivate jõudude ülekandmiseks vajalik tugevus, samuti disaini lihtsus ja monteerimise lihtsus.
Joonisel fig. 1 on kujutatud kergelt koormatud kangmehhanismi konstruktsioon, mis tagab ajamiga koostepoolautomaatse seadme liikuva poolsüdamiku. See koosneb poolautomaatse seadme raami 3 külge kinnitatud kahe käega juhtivast hoovast 1, mis on kinnitatud fikseeritud teljele 2 ja mille käitav õlg on ühendatud läbi telje 4 tõukejõu 2 silmaga, mis on varustatud vedruseade, mis tagab mehhanismi tagasipöördumise algsesse asendisse. Samal ajal on kangi 1 käitatavale õlale telje 11 kaudu pööratavalt paigaldatud rull 6, mis on kontaktis kiiluga 7, mis on ühendatud ajami pneumaatilise silindri 9 vardaga 8, mis on kinnitatud kronsteini 10 külge. paigaldatud poolautomaatse seadme raamile 3. Lisaks on sama telje 11 kaudu kangi 1 käitatav õlg pöördeliselt ühendatud tõukehargiga 12, mis on pööratavalt ühendatud liuguriga 14 selle vastasotsa paigaldatud kahvli ja telje 13 abil, mis asub reguleerimisvõimalus vahehoova 15 soones oleva kruvi abil. Omakorda on hoob 15 klemmiühenduse abil jäigalt kinnitatud rullile 16, mis on pööratavalt korpusesse 17 kinnitatud, kinnitatud raami külge. 3 poolautomaatseadmest. Telje 16 teises otsas, samuti klemmühenduse abil, on fikseeritud hoob 18, mis on botide abil ühendatud kangiga 19, millel asub liigutatav poolsüdamik 20.
Varraste 5 ja 12 pöördliigendite telgede 4, 11 ja 13 konstruktsioon on soovitatav läbi viia vastavalt standardile GOST 9650 - 80 (telgede tüübid on näidatud joonisel 2), samas kui need on kinnitatud ainult aksiaalsuunas. suunas, mille jaoks kasutatakse erinevat tüüpi seibe ja vedrurõngaid.
 Pöördliidete teljed on tavaliselt valmistatud süsinikkonstruktsiooniterastest vastavalt standardile GOST 1050 (teras 35, teras 45) või legeeritud konstruktsiooniterasest vastavalt standardile GOST 4543 (teras 20X, teras 40X), mis on parandatud kõvaduseni 240–280 HB , või kõvaduseni 35–40 HRC karastatud pind, on muud tüüpi materjalide kasutamine ja kuumtöötlemine tavaliselt seotud pöördekoormuste suurenemisega.
Pöördliidete teljed on tavaliselt valmistatud süsinikkonstruktsiooniterastest vastavalt standardile GOST 1050 (teras 35, teras 45) või legeeritud konstruktsiooniterasest vastavalt standardile GOST 4543 (teras 20X, teras 40X), mis on parandatud kõvaduseni 240–280 HB , või kõvaduseni 35–40 HRC karastatud pind, on muud tüüpi materjalide kasutamine ja kuumtöötlemine tavaliselt seotud pöördekoormuste suurenemisega.
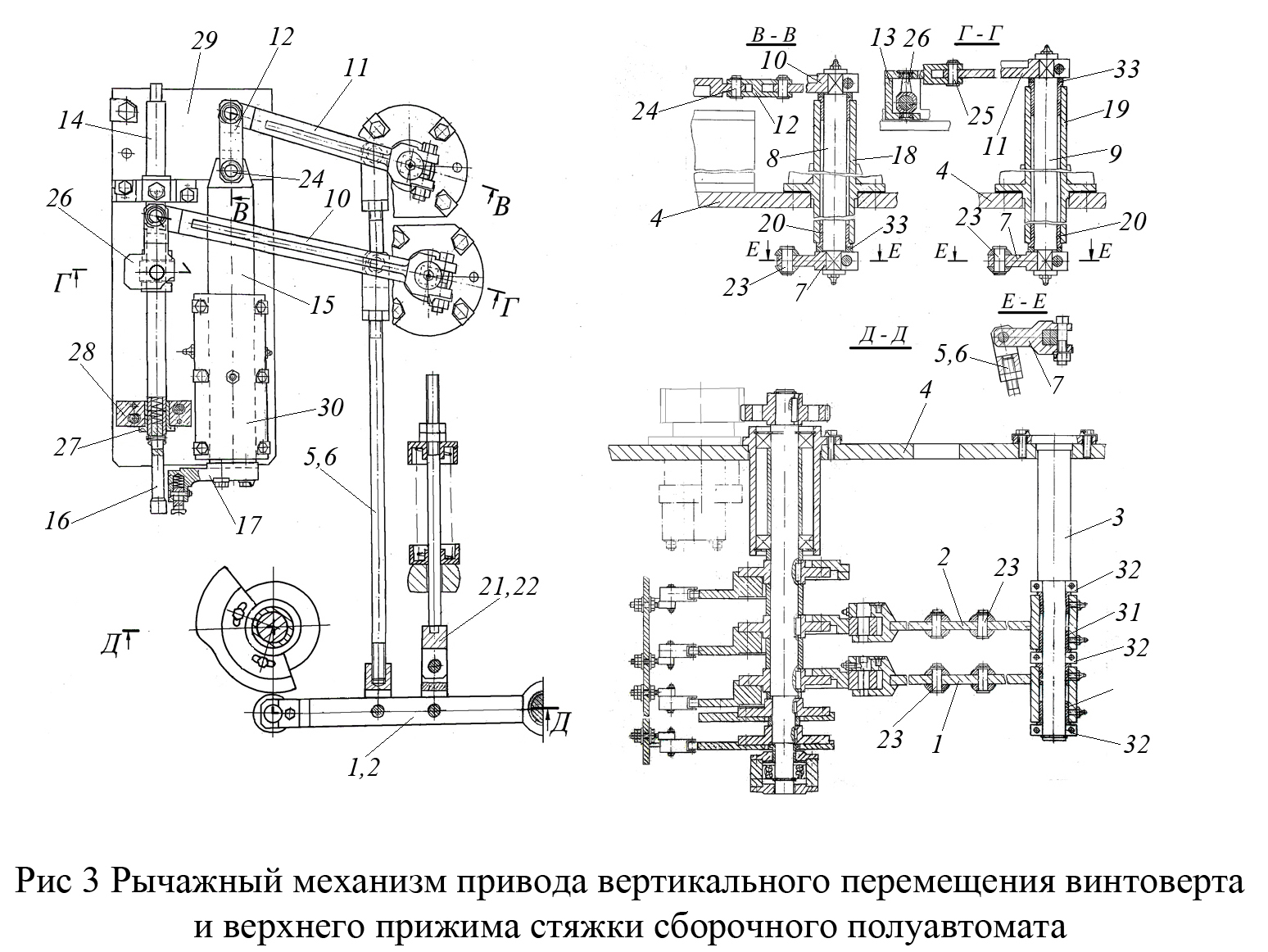
Sarnaseid osade pöördühendusi kasutatakse ajami kangmehhanismis kruvikeeraja vertikaalseks liikumiseks ja montaažipoolautomaatse seadme sideme ülemises klambris, mille konstruktsioon on näidatud joonisel fig. 3. See koosneb juhthoobadest 1, 2, mis on pööratavalt kinnitatud fikseeritud teljele 3, mis on kinnitatud raami 4 külge ja saavad vastavate nukkide ajamit, telgede 23 kaudu edastavad need liikumise varrastele 5, 6, mis on samuti telgede 23 abil pööratavalt ühendatud vahehoobadega 7. Kangid 7 on jäigalt kinnitatud rullikutele 8 ja 9 klemmiühenduste abil, mis on pöördeliselt kinnitatud klambrite 18 ja 19 aukudes olevatele liugelaagritele 20 raamile 4 ja käitatavad hoovad 10 ja 11 on samuti jäigalt fikseeritud nende rullide vastasotstele klemmühenduste abil läbi telgede 24 ja 25, mis on ühendatud varrastega 12 ja 13. Samal ajal on varras 11 läbi telgede 12 ja 13 algne telg 26 on ühendatud vardaga 14, millel on võimalus pöörata ja aksiaalselt liikuda korpustesse 28 paigaldatud liugelaagrites 27, mis on kinnitatud kronsteinile 29, mis on paigaldatud raamile 4, ja tõukejõu 12 läbi. telg 24 on pööratavalt ühendatud liuguriga 15, mis kannab klambrit 17 ja millel on liikuva liikumise võimalus juhikutes 30, mis on samuti paigaldatud kronsteinile 29. Lisaks on telgede 23 kaudu juhitavad hoovad 1 ja 2 pööratavalt ühendatud vardad 12 ja 22 tagavad vedrutagastushoova mehhanismid nende algsesse asendisse. Teljele 3 liugelaagrite 31 abil paigaldatud hoobade 1 ja 2 teljesuunalise asendi täpsus tagatakse kulumisrõngaste 32 paigaldamisega. Rulli 8 aksiaalse asendi täpsus hoobadega 7 ja 10, samuti rulli 9 koos hoobadega 7 ja 11 tagatakse kulumisrõngaste 33 paigaldamisega.
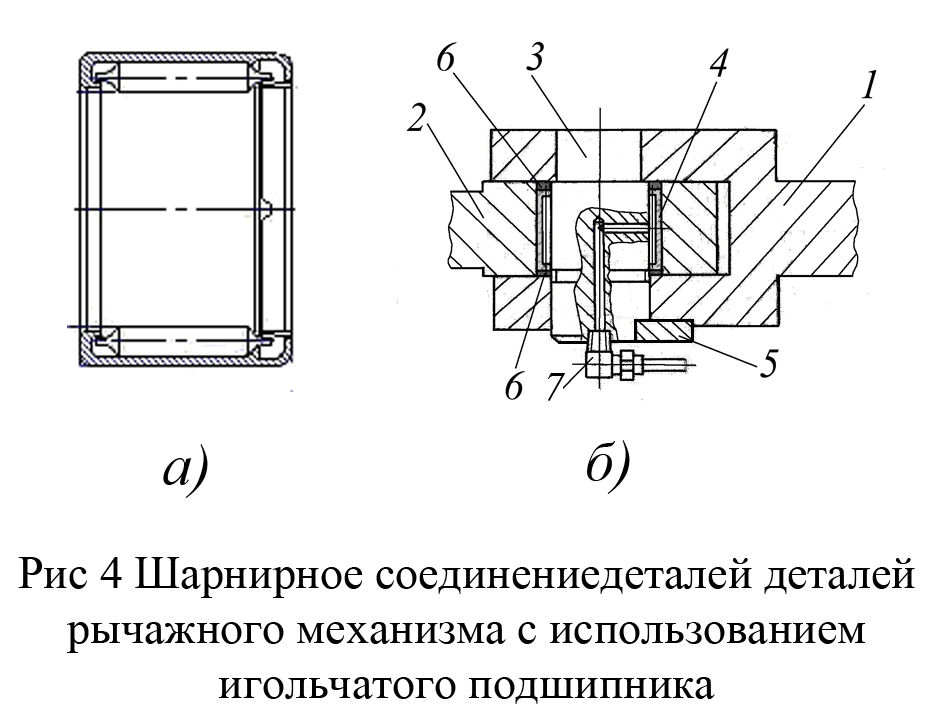
 Paljudel juhtudel, kui on vaja minimeerida hoobmehhanismi liigendliigendite vahe (mehhanism koos väljundlüli täpse liikumisega), ühendatakse vaadeldavate teljekonstruktsioonide asemel mehhanismi osad telje abil. millele on paigaldatud nõellaager. Sel juhul kasutatakse tavaliselt vähendatud radiaalmõõtmega nõellaagreid, näiteks stantsitud korpuses (vt joonis 4a). Selline ühendusosade liigendühendus nõellaagri abil on näidatud joonisel fig. 4b. See koosneb kangmehhanismi osadest 1 ja 2, astmelisest teljest 3, mis on pöörlemisel fikseeritud lukustusvarda 5 abil, stantsitud korpusega nõellaagrist 4, mille täpne aksiaalne asend telje 3 suhtes on tagatud paigaldamisega. rõngad 6, samal ajal kui nõellaagri 4 rullide tsentraliseeritud määrimine toimub läbi teljel 3 oleva ava, mis on ühendatud määrdesüsteemi 7 nipliga. on tavaliselt valmistatud konstruktsiooni- või legeerterasest ja selle pind on karastatud kõvaduseni vähemalt 45 HRC. Teljepinna maandumine nõellaagri paigaldamiseks toimub vastavalt üleminekusobivusele, näiteks k6.
Paljudel juhtudel, kui on vaja minimeerida hoobmehhanismi liigendliigendite vahe (mehhanism koos väljundlüli täpse liikumisega), ühendatakse vaadeldavate teljekonstruktsioonide asemel mehhanismi osad telje abil. millele on paigaldatud nõellaager. Sel juhul kasutatakse tavaliselt vähendatud radiaalmõõtmega nõellaagreid, näiteks stantsitud korpuses (vt joonis 4a). Selline ühendusosade liigendühendus nõellaagri abil on näidatud joonisel fig. 4b. See koosneb kangmehhanismi osadest 1 ja 2, astmelisest teljest 3, mis on pöörlemisel fikseeritud lukustusvarda 5 abil, stantsitud korpusega nõellaagrist 4, mille täpne aksiaalne asend telje 3 suhtes on tagatud paigaldamisega. rõngad 6, samal ajal kui nõellaagri 4 rullide tsentraliseeritud määrimine toimub läbi teljel 3 oleva ava, mis on ühendatud määrdesüsteemi 7 nipliga. on tavaliselt valmistatud konstruktsiooni- või legeerterasest ja selle pind on karastatud kõvaduseni vähemalt 45 HRC. Teljepinna maandumine nõellaagri paigaldamiseks toimub vastavalt üleminekusobivusele, näiteks k6.
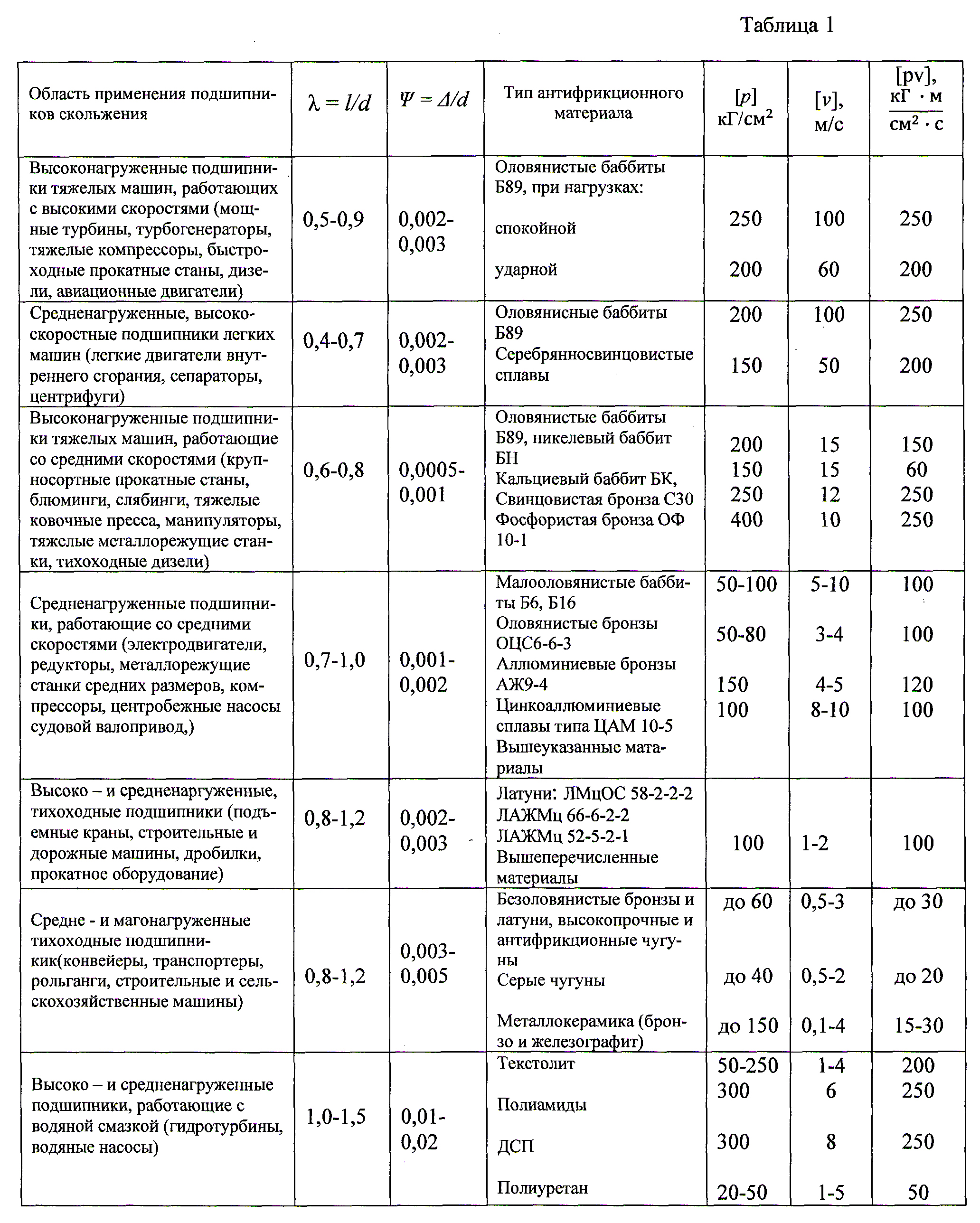
 Mõlemas joonisel fig. 1 ja 3 liikumise ülekandmiseks vahehoovalt juhitavale, mis on nihutatud vastavalt mehhanismide paigutusele telgsuunas märkimisväärse vahemaa jooksul, kasutatakse rulle, mis on pöördeliselt paigaldatud liugelaagritele, surutakse fikseeritud korpusesse, mis on raamile paigaldatud. Nii et liigutatava poolsüdamiku ajami hoobmehhanismis (vt joonis 1) on hoovad 15 ja 17 ühendatud võlliga 16 klemmiühenduse abil ning vertikaalse ajami hoobmehhanismis kruvikeeraja ja ülemise klambri liigutamine (vt joonis 3), hoovad 7 ja 10 ning hoovad 7 ja 11 on ühendatud klemmühenduse abil rullikutega 8 ja 9. Samal ajal on soovitatav seada liugelaagripukside geomeetrilised mõõtmed ja tolerantsid vastavalt standarditele GOST 1978 - 81 ja GOST 11525 - 82 ning tehnilised nõuded vastavalt standarditele GOST 25105 - 82. Liiklaagripukside materjalina kasutatakse kõige sagedamini :
Mõlemas joonisel fig. 1 ja 3 liikumise ülekandmiseks vahehoovalt juhitavale, mis on nihutatud vastavalt mehhanismide paigutusele telgsuunas märkimisväärse vahemaa jooksul, kasutatakse rulle, mis on pöördeliselt paigaldatud liugelaagritele, surutakse fikseeritud korpusesse, mis on raamile paigaldatud. Nii et liigutatava poolsüdamiku ajami hoobmehhanismis (vt joonis 1) on hoovad 15 ja 17 ühendatud võlliga 16 klemmiühenduse abil ning vertikaalse ajami hoobmehhanismis kruvikeeraja ja ülemise klambri liigutamine (vt joonis 3), hoovad 7 ja 10 ning hoovad 7 ja 11 on ühendatud klemmühenduse abil rullikutega 8 ja 9. Samal ajal on soovitatav seada liugelaagripukside geomeetrilised mõõtmed ja tolerantsid vastavalt standarditele GOST 1978 - 81 ja GOST 11525 - 82 ning tehnilised nõuded vastavalt standarditele GOST 25105 - 82. Liiklaagripukside materjalina kasutatakse kõige sagedamini :
- pronks (tina, tina-plii, tina-plii-tsink, alumiinium-raud),
- hõõrdumisvastased malmid (ACHS, ACHK),
- babbits,
− mittemetallist materjalid (teksoliit, kaproloon, fluoroplast, polükarbonaat).
Rohkem üksikasjalikud soovitused liugelaagrite projekteerimiseks on töös antud.
Kangimehhanismi ühendatud osade aukude telgede mitteparalleelsuse kompenseerimiseks, näiteks liuguriga ühendusvarras või vardaga hoob, eriti mehhanismides, mis töötavad suurel kiirusel ja tagavad täpse liikumise. väljundlüli, kasutatakse nii originaalseid kuulliigendit kui ka ShS-tüüpi sfäärilisi laagreid vastavalt standardile GOST 3635 - 78 (vt joonis 5). 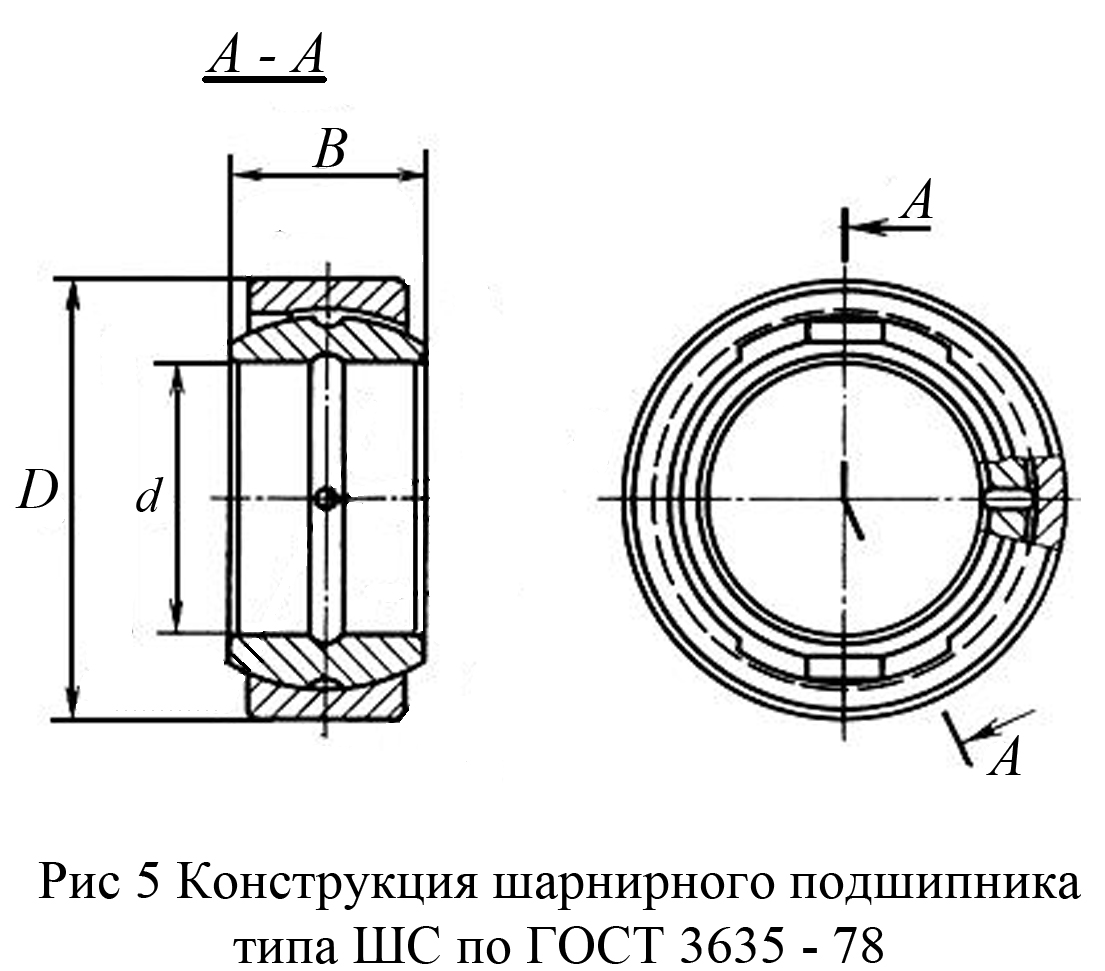 Joonisel fig. 6 näidatud originaalne disain kangmehhanismi kahe osa - tiibade 1 ja varda 2 - pöördliigend. See pöördliigend koosneb liugelaagritele tiibade 1 avasse paigaldatud teljest 3, mis on kinnitatud aksiaalsuunas õla ja otsaseibiga ning kaks komplekti, mis koosnevad kraakerist 4 ja klambrist 5. Sel juhul tehakse kraakeri 4 teljele 3 ja puurile 6 augud, millesse tõukejõud 2 läbib piluga, ja pindadele, mida mööda kraakerid 4 ja puur 5 on kokku puutunud, on tehtud sfääriliseks. Kreekerite 4 ja klambrite 5 kuulliigendite vahe on reguleeritud ja fikseeritud kahe mutrite ja lukustusmutrite 6 komplektiga.
Joonisel fig. 6 näidatud originaalne disain kangmehhanismi kahe osa - tiibade 1 ja varda 2 - pöördliigend. See pöördliigend koosneb liugelaagritele tiibade 1 avasse paigaldatud teljest 3, mis on kinnitatud aksiaalsuunas õla ja otsaseibiga ning kaks komplekti, mis koosnevad kraakerist 4 ja klambrist 5. Sel juhul tehakse kraakeri 4 teljele 3 ja puurile 6 augud, millesse tõukejõud 2 läbib piluga, ja pindadele, mida mööda kraakerid 4 ja puur 5 on kokku puutunud, on tehtud sfääriliseks. Kreekerite 4 ja klambrite 5 kuulliigendite vahe on reguleeritud ja fikseeritud kahe mutrite ja lukustusmutrite 6 komplektiga.  Joonisel fig. 7 on kujutatud standardsete pöördlaagrite abil kangimehhanismide pöörlevate osade enamkasutatavad konstruktsiooniskeemid. Joonisel fig 7a on kujutatud laagri konstruktsiooni, milles laagri sisemine rõngas on fikseeritud. See koosneb kangimehhanismi 1 ja 2 osadest, samas kui osa 2 augus on telg 3, mis on fikseeritud telje suunas lukustusvardaga 6 ja osa 1 avas minimaalse vahega (vastavalt sobivusele H7) paigaldatakse ja kinnitatakse sellesse ШС tüüpi liigendlaager telje suunas kinnitusrõngastega 6. Lisaks paigaldatakse teljele sfäärilise laagri 4 sisemine rõngas interferentsiga (liitmikul k6). 3 ja fikseeritakse sellele telje suunas rõngaste abil 7. laagri välimine ring. See osade 1 ja 2 liigend sisaldab astmelist telge 3, mis on paigaldatud osa 2 avasse adapterpukside 6 ja 7 abil ja kinnitatud mutriga 8 ning pöördlaager 4 on paigaldatud osa 1 avasse ja selle välimisse auku. rõngas on fikseeritud aksiaalsuunas rõngastega 5, mis fikseeritakse neetidega 9. Samal ajal ei ole teljele 3 aksiaalsuunas paigaldatud laagri 4 sisemine rõngas fikseeritud, mis võimaldab detailil 1 ise- joondada teljele 3.
Joonisel fig. 7 on kujutatud standardsete pöördlaagrite abil kangimehhanismide pöörlevate osade enamkasutatavad konstruktsiooniskeemid. Joonisel fig 7a on kujutatud laagri konstruktsiooni, milles laagri sisemine rõngas on fikseeritud. See koosneb kangimehhanismi 1 ja 2 osadest, samas kui osa 2 augus on telg 3, mis on fikseeritud telje suunas lukustusvardaga 6 ja osa 1 avas minimaalse vahega (vastavalt sobivusele H7) paigaldatakse ja kinnitatakse sellesse ШС tüüpi liigendlaager telje suunas kinnitusrõngastega 6. Lisaks paigaldatakse teljele sfäärilise laagri 4 sisemine rõngas interferentsiga (liitmikul k6). 3 ja fikseeritakse sellele telje suunas rõngaste abil 7. laagri välimine ring. See osade 1 ja 2 liigend sisaldab astmelist telge 3, mis on paigaldatud osa 2 avasse adapterpukside 6 ja 7 abil ja kinnitatud mutriga 8 ning pöördlaager 4 on paigaldatud osa 1 avasse ja selle välimisse auku. rõngas on fikseeritud aksiaalsuunas rõngastega 5, mis fikseeritakse neetidega 9. Samal ajal ei ole teljele 3 aksiaalsuunas paigaldatud laagri 4 sisemine rõngas fikseeritud, mis võimaldab detailil 1 ise- joondada teljele 3. 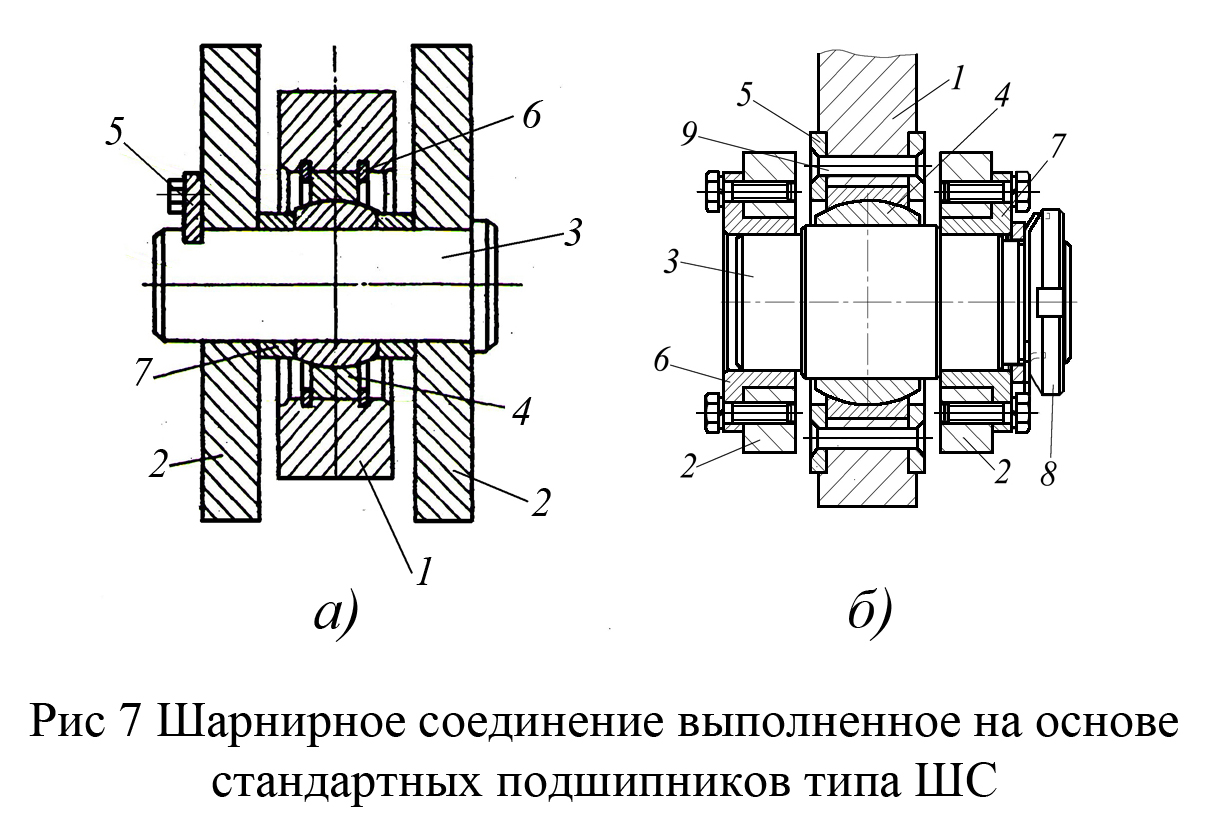
Jõuhoobmehhanismide pöördliigendid.
Jõuhoova mehhanismide hulka kuuluvad tugevalt koormatud tehnoloogiliste seadmete ja masinate ajamid, mis teatud juhtudel töötavad märkimisväärsetel kiirustel ja seetõttu mõjutavad nende pöördeliigendid täiendavalt tekkivad dünaamilised koormused. Samal ajal on enamikul juhtudel, näiteks pressimisseadmetes, ettepoole suunatud käigu jõud palju suurem kui tagurpidikäigul, mis loomulikult seab selle pöördeliigendite konstruktsioonile lisatingimusi.
Joonisel fig. 8 on kujutatud tüüpilist konstruktsiooni tugevalt koormatud liuguri pöördliigendist koos mitme asendiga külmsuunalise masina käitamisvända mehhanismi ühendusvardaga. See liigendliigend kannab vastavalt mehhanismi laadimistsüklile edasi mitu korda rohkem jõudu edasi kui tagasikäigu ajal, mis selgitab selle spetsiifilist disaini. Sellise liigendliigendi disainiomadus, mis seisneb selles, et liugelaagri 4 hülsi pind, mis asub ühendusvarda 2 augus ja on liuguri töökäigu ajal ühenduses ühendusteljega 3 1 ettepoole, on mitu korda suurem kui selle pind, mis puutub kokku teljega 3 liuguri käigu ajal 1 tagasi. Samal ajal paigaldatakse ühendustelje 3 ja hülsi 4 vahele minimaalsed vahed ning telg 3 on vaatamata tihedale, tühikuteta sobitusele liuguri 1 avas täiendavalt fikseeritud kahe lukustusvarda 5 abil, mis takistab selle pöörlemine ja aksiaalne nihe. Lisaks on hülss 4, hoolimata tihedast lõtkuvabast kinnitusest ühendusvarda 2 avasse, lisaks fikseeritud lukustuskruvidega pöörlemise vastu. Hülss 4 on tavaliselt valmistatud pronksist Br0F10-1 ja telg 3 on valmistatud terasest 40Kh, 40KhN ning on karastatud kõvaduseni 42–47 HRC ja rohkem, eriti koormatud liigendites, kui pronks ei ole. [R]
, või ,
see on valmistatud legeerterasest, mis on karastatud kõvaduseni 40–45 HRC. 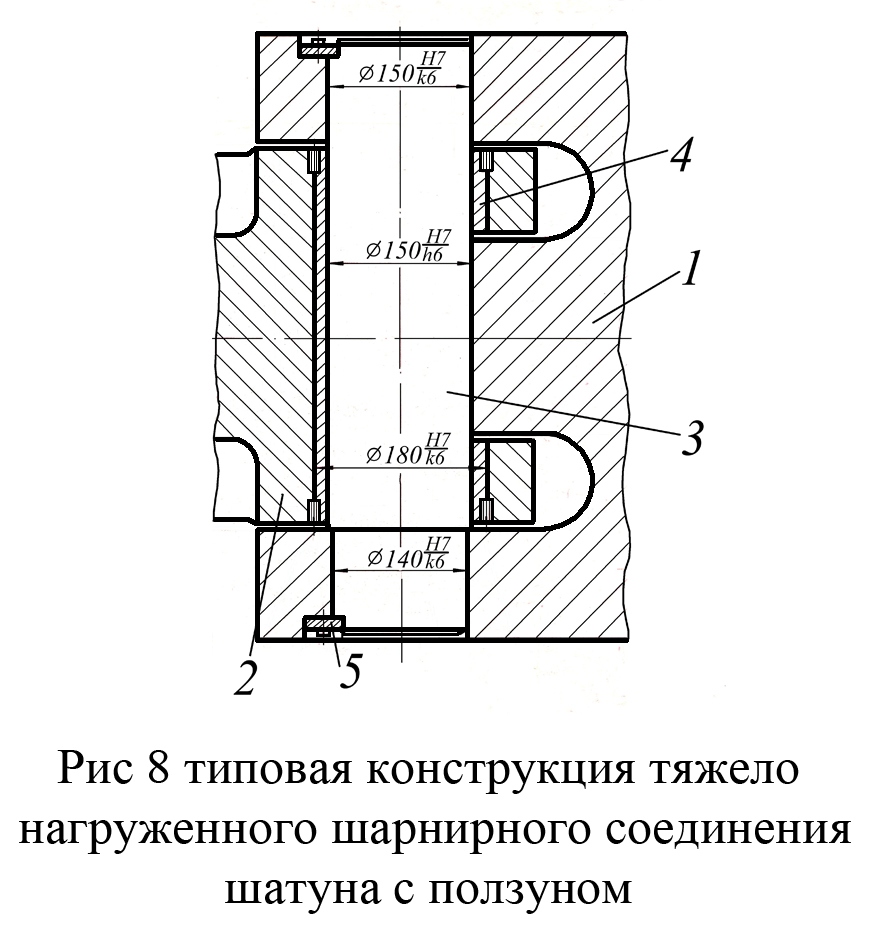 Joonisel fig. 9 on kujutatud ühendusvarda ja tugevalt koormatud väntmehhanismi liuguri liigendühenduse algne konstruktsioon. See sisaldab ühendusvarda 1 pead, mis on valmistatud kahvli kujul, millel on telje 2 jaoks silindriline ava, polti 3 koos mutriga 4, mis fikseerivad telje 2 asendi ühendusvarda 1 peas. klemmiühenduse pingutamisel hülss 6, mis asub liuguri 5 avas. Samal ajal on kahvel valmistatud kesksoonega, mis võimaldab poldi 3 pingutamisel mutriga 4 luua lõtkuvaba lõtku ühendusvarda pea 1 klemmiühendusel teljega 2 ja hülsil 6 koos liuguriga 5 on kaldvarda pea 1 kaldpindadega paralleelsed kalded, mis võimaldab suurendada ühenduse kandevõimet. ühendusvarras teljega 2, vähendamata telje 2 ja hülsi 6 ühenduse kandevõimet.
Joonisel fig. 9 on kujutatud ühendusvarda ja tugevalt koormatud väntmehhanismi liuguri liigendühenduse algne konstruktsioon. See sisaldab ühendusvarda 1 pead, mis on valmistatud kahvli kujul, millel on telje 2 jaoks silindriline ava, polti 3 koos mutriga 4, mis fikseerivad telje 2 asendi ühendusvarda 1 peas. klemmiühenduse pingutamisel hülss 6, mis asub liuguri 5 avas. Samal ajal on kahvel valmistatud kesksoonega, mis võimaldab poldi 3 pingutamisel mutriga 4 luua lõtkuvaba lõtku ühendusvarda pea 1 klemmiühendusel teljega 2 ja hülsil 6 koos liuguriga 5 on kaldvarda pea 1 kaldpindadega paralleelsed kalded, mis võimaldab suurendada ühenduse kandevõimet. ühendusvarras teljega 2, vähendamata telje 2 ja hülsi 6 ühenduse kandevõimet. 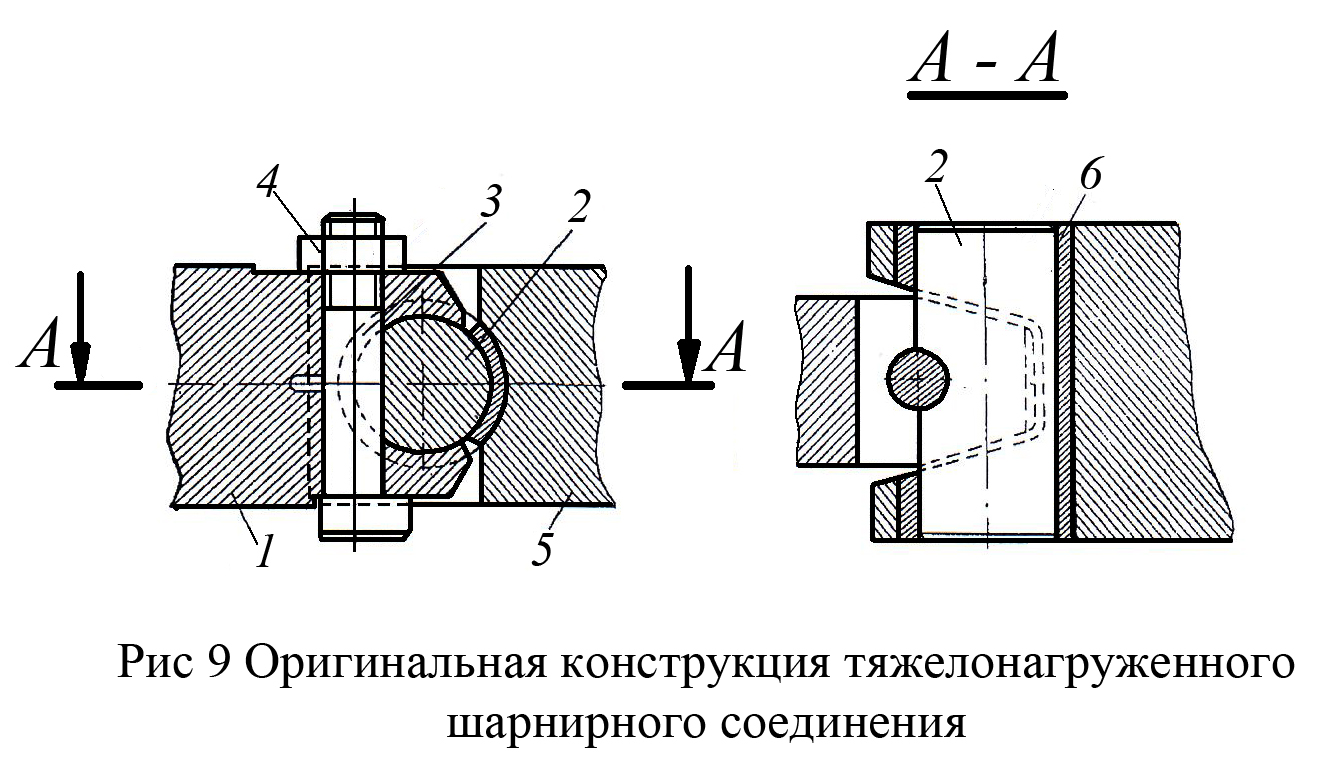 Kui tugevalt koormatud vända ajam asub raami tihedalt asetsevate seinte vahel, tekitab see olulisi raskusi ühendusvarda ja selle mehhanismi liuguri liigendühenduse loomisel. Joonisel fig. 10 on kujutatud liuguriga ühendusvarda algse pöörde konstruktsioon, milles tehnoloogiliste jõudude ülekandmiseks piisab hinge telje ja liuguri tugihülsi kontaktist. See ühendusvarda 1 liigendühendus väntmehhanismi liuguriga 2 koosneb pimedate vertikaalsete ja horisontaalsete läbivate aukudega teljest 3, kahest telje 3 horisontaalses avas paiknevast krakkist 6, mis on kinnitatud poltidega 7. Samal ajal aja jooksul on ühendusvarras 1 jäigalt fikseeritud (kinnitatud joonisele 225, pole näidatud) kujulise alumise otsaga varras 4 süvendiga 5, mis asub hülsi 3 vertikaalses augus ja kontakteerub läbi koonilise õla 11 koonusekujulised õlad 11 kreekerite alumisel otsal 6.
Kui tugevalt koormatud vända ajam asub raami tihedalt asetsevate seinte vahel, tekitab see olulisi raskusi ühendusvarda ja selle mehhanismi liuguri liigendühenduse loomisel. Joonisel fig. 10 on kujutatud liuguriga ühendusvarda algse pöörde konstruktsioon, milles tehnoloogiliste jõudude ülekandmiseks piisab hinge telje ja liuguri tugihülsi kontaktist. See ühendusvarda 1 liigendühendus väntmehhanismi liuguriga 2 koosneb pimedate vertikaalsete ja horisontaalsete läbivate aukudega teljest 3, kahest telje 3 horisontaalses avas paiknevast krakkist 6, mis on kinnitatud poltidega 7. Samal ajal aja jooksul on ühendusvarras 1 jäigalt fikseeritud (kinnitatud joonisele 225, pole näidatud) kujulise alumise otsaga varras 4 süvendiga 5, mis asub hülsi 3 vertikaalses augus ja kontakteerub läbi koonilise õla 11 koonusekujulised õlad 11 kreekerite alumisel otsal 6. 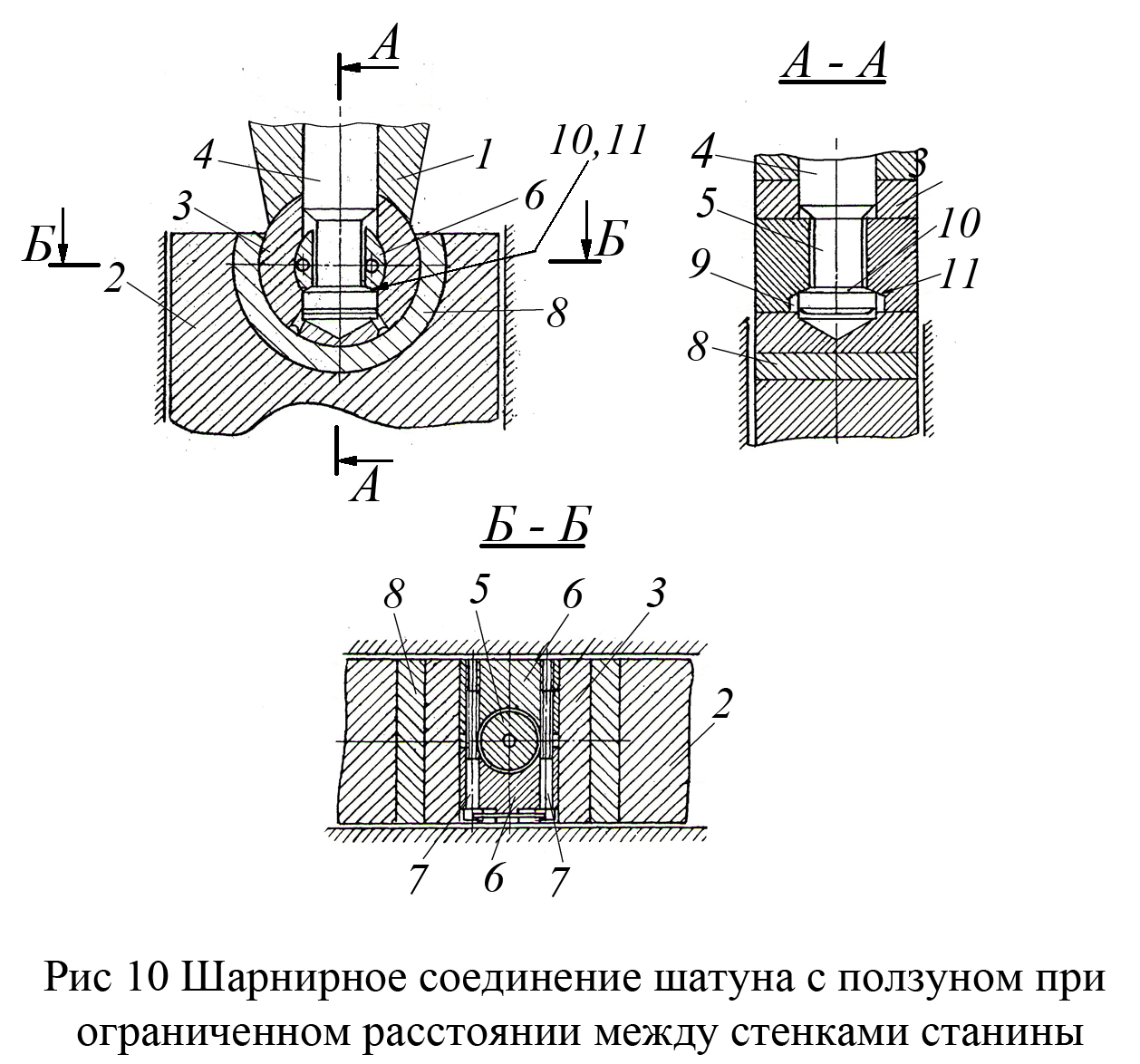 Tehnoloogiliste seadmete töövända mehhanismi liuguri täpse liikumise tagamiseks on vaja välistada selle moonutused juhikutes, mis on põhjustatud ühendusvarda asukoha vigadest. Selleks ühendatakse ühendusvarda liigendiga liuguriga mööda sfäärilisi pindu. Joonisel fig. 11 on kujutatud ühendusvarda 1 liigendühendust pressi täitevväntmehhanismi liuguriga 2, mis sisaldab kruvi 3, mille alumises otsas on kerakujuline pea kontaktis liugurisse kinnitatud sfäärilise tõukejõu laagriga 4 2, samal ajal kui kruvi 3 sfääriline pea surutakse ülalt tõukelaagri külge sisetüki 5 ja mutri 6 abil.
Tehnoloogiliste seadmete töövända mehhanismi liuguri täpse liikumise tagamiseks on vaja välistada selle moonutused juhikutes, mis on põhjustatud ühendusvarda asukoha vigadest. Selleks ühendatakse ühendusvarda liigendiga liuguriga mööda sfäärilisi pindu. Joonisel fig. 11 on kujutatud ühendusvarda 1 liigendühendust pressi täitevväntmehhanismi liuguriga 2, mis sisaldab kruvi 3, mille alumises otsas on kerakujuline pea kontaktis liugurisse kinnitatud sfäärilise tõukejõu laagriga 4 2, samal ajal kui kruvi 3 sfääriline pea surutakse ülalt tõukelaagri külge sisetüki 5 ja mutri 6 abil.  Tugevalt koormatud väntmehhanismides toimub kangi kanna ja voodri vahelise kõrge erisurve tõttu, hoolimata asjaolust, et see on valmistatud legeeritud terasest ja sellel on karastamise teel saavutatud kõrge kõvadus, selle intensiivne kulumine ja selle tulemusena nende osade vahelise radiaalse kliirensi suurenemine, mis muudab mehhanismi raskemaks. Joonisel fig. 12 kujutab vända-vända mehhanismi osade liigendühenduse konstruktsiooni, mis võimaldab seadme töötamise ajal kompenseerida kangi kanna ja voodri vahelist kulumist. See hoobade 1 ja 2 liigendühendus ühendusvardaga 3 sisaldab telge 4, mis ühendab pööratavalt kangi 1 ja ühendusvarda 3, lamedaid plaate 5, mis on kinnitatud ühendusvarda 3 otspindadele poltide 9 abil, telg 6 on ekstsentriliste tihvtidega. (ekstsentrilisusega e), millele on paigaldatud roomikud 7, mis paiknevad vooderdiste 5 soontes. Lisaks on ühendusvarda 3 mõlemas otsas jäigalt kinnitatud juhttihvtid 8, mis on kontaktis vastastikuse pikisuunalise juhikuga. vooderdistesse 5 sooned ja ühendusvarda 3 raadiuspinnale kinnitatakse kruvide abil sisetükk 10, mis mehhanismi algseisundis moodustab hoova 1 radiaalse lõtku a, tagades selle normaalse töö. Radiaalse kliirensi a suurenemisega mehhanismi töö ajal reguleeritakse seda. Selleks keeratakse esmalt lahti poltide 9 pingutus, mille järel pööratakse telge 6, mis liigutab roomikuid 7 oma ekstsentriliste tihvtidega, mis samal ajal panevad ühendusvarda 3 radiaalsuunas liikuma (liikumine ühendusvarda 3 radiaalsuunaline liikumine tagatakse selle otstesse kinnitatud tihvtide 8 liigutamisega mööda vooderdiste 5) sooni. Selle tulemusena läheneb sisestus 10 kangi 1 kannale ja selle tulemusena väheneb vahe a vajaliku väärtuseni. Pärast vajaliku pilu a saavutamist kinnitatakse vooderdised 5 poltidega 9 soovitud asendisse.
Tugevalt koormatud väntmehhanismides toimub kangi kanna ja voodri vahelise kõrge erisurve tõttu, hoolimata asjaolust, et see on valmistatud legeeritud terasest ja sellel on karastamise teel saavutatud kõrge kõvadus, selle intensiivne kulumine ja selle tulemusena nende osade vahelise radiaalse kliirensi suurenemine, mis muudab mehhanismi raskemaks. Joonisel fig. 12 kujutab vända-vända mehhanismi osade liigendühenduse konstruktsiooni, mis võimaldab seadme töötamise ajal kompenseerida kangi kanna ja voodri vahelist kulumist. See hoobade 1 ja 2 liigendühendus ühendusvardaga 3 sisaldab telge 4, mis ühendab pööratavalt kangi 1 ja ühendusvarda 3, lamedaid plaate 5, mis on kinnitatud ühendusvarda 3 otspindadele poltide 9 abil, telg 6 on ekstsentriliste tihvtidega. (ekstsentrilisusega e), millele on paigaldatud roomikud 7, mis paiknevad vooderdiste 5 soontes. Lisaks on ühendusvarda 3 mõlemas otsas jäigalt kinnitatud juhttihvtid 8, mis on kontaktis vastastikuse pikisuunalise juhikuga. vooderdistesse 5 sooned ja ühendusvarda 3 raadiuspinnale kinnitatakse kruvide abil sisetükk 10, mis mehhanismi algseisundis moodustab hoova 1 radiaalse lõtku a, tagades selle normaalse töö. Radiaalse kliirensi a suurenemisega mehhanismi töö ajal reguleeritakse seda. Selleks keeratakse esmalt lahti poltide 9 pingutus, mille järel pööratakse telge 6, mis liigutab roomikuid 7 oma ekstsentriliste tihvtidega, mis samal ajal panevad ühendusvarda 3 radiaalsuunas liikuma (liikumine ühendusvarda 3 radiaalsuunaline liikumine tagatakse selle otstesse kinnitatud tihvtide 8 liigutamisega mööda vooderdiste 5) sooni. Selle tulemusena läheneb sisestus 10 kangi 1 kannale ja selle tulemusena väheneb vahe a vajaliku väärtuseni. Pärast vajaliku pilu a saavutamist kinnitatakse vooderdised 5 poltidega 9 soovitud asendisse.  Pöördliigendite osad (telg ja puks) teostavad hoobmehhanismi töötamise ajal reeglina korduvalt - tagurpidi, õõtsuvat liikumist, mis põhjustab puksi teatud sektori enneaegset kulumist ja tekitab vajaduse selle enneaegseks kulumiseks. asendamine. Pöördliigend, mille konstruktsioon on näidatud joonisel fig. 13, võimaldab asendada hülsi tagasipööratud, õõtsuva liikumise telje suhtes perioodilise pöörlemisega ühes suunas, mis pikendab oluliselt hülsi kasutusiga, kuna selle teljega kokkupuutuv ava kulub ühtlaselt. hoovamehhanismi osade ühendamine. See koosneb kahvliga veohoovast 1 ja aasaga juhitavast hoovast 2, kusjuures telg 3 asub kahvli augus ning puksid 13 ja 14 on surutud aasa avasse, millesse on paigaldatud puksid 4 , ja rõngad on paigaldatud telje 3 5, 6 ja nende vahel paikneva vedru 7 kesksele spliftpinnale 12. Rõngad 5 ja 6 on valmistatud välimiste põrkhammastega 11, puksid 4 välise 9 ja sisemise 10 põrkhammastega ning puksid 13 ja 14 sisemiste põrkhammastega 8. Telg 3 on fikseeritud pöörlemise ja aksiaalse nihke tõttu kahvli kahvlis. hoob 1 korgi 15, seibide 16 ja poltide 17 abil. Nagu näidatud joonisel fig. 13 puksid 13 ja 14 oma sisemiste põrkhammastega 8 haakuvad pukside 4 väliste põrkhammastega 9 ja rõngad 5, 6 oma väliste põrkhammastega 11 haakuvad pukside 4 sisemiste põrkhammastega 10. Vedru 7 mõjub pidevalt sisemistele otstele rõngastest 5 ja 6, mis püüavad pööratavate osade põrkhambaid. Pöördliigendi osade ühenduses olevate põrkhammaste suund valitakse selliselt, et kui telg 3 liigub koos rõngastega 5 ja 6 päripäeva (kui kangimehhanism liigub koormuse all), siis põrkmehhanism rõngaste hambad 11 haakuvad pukside 4 põrkhammastega 10 ja tõmbavad viimased samas suunas, pannes need pöörlema kangi 2 aasasse surutud pukside 13 ja 14 ning põrkhammaste 9 suhtes. pukside 4 libisemine pukside 13 ja 14 hammaste 9 suhtes, mille tulemusena puksid 4 nihkuvad aksiaalsuunas pöördeliigendi keskpunkti suunas ja suruvad kokku vedru 7 Kui telg 3 liigub vastupäeva ( hoovamehhanismi liikumise ajal ilma koormuseta) libisevad puksid 4 põrkliigendites rõngastega 5 ja 6 ning fikseeritakse kangi 2 noa suhtes. Seega tagab pöördeliigendi konstruktsioon ühe- pukside 4 tsükliline pöörlemine telje 3 vastupidise pöörlemise ajal, mis tagab telje välispinna ja puksi sisepinna ühtlase kulumise. Kuid kangmehhanismi osade liigendühenduse kavandatud konstruktsioon ei võimalda kompenseerida selle töö ajal tekkivat tühimikku.
Pöördliigendite osad (telg ja puks) teostavad hoobmehhanismi töötamise ajal reeglina korduvalt - tagurpidi, õõtsuvat liikumist, mis põhjustab puksi teatud sektori enneaegset kulumist ja tekitab vajaduse selle enneaegseks kulumiseks. asendamine. Pöördliigend, mille konstruktsioon on näidatud joonisel fig. 13, võimaldab asendada hülsi tagasipööratud, õõtsuva liikumise telje suhtes perioodilise pöörlemisega ühes suunas, mis pikendab oluliselt hülsi kasutusiga, kuna selle teljega kokkupuutuv ava kulub ühtlaselt. hoovamehhanismi osade ühendamine. See koosneb kahvliga veohoovast 1 ja aasaga juhitavast hoovast 2, kusjuures telg 3 asub kahvli augus ning puksid 13 ja 14 on surutud aasa avasse, millesse on paigaldatud puksid 4 , ja rõngad on paigaldatud telje 3 5, 6 ja nende vahel paikneva vedru 7 kesksele spliftpinnale 12. Rõngad 5 ja 6 on valmistatud välimiste põrkhammastega 11, puksid 4 välise 9 ja sisemise 10 põrkhammastega ning puksid 13 ja 14 sisemiste põrkhammastega 8. Telg 3 on fikseeritud pöörlemise ja aksiaalse nihke tõttu kahvli kahvlis. hoob 1 korgi 15, seibide 16 ja poltide 17 abil. Nagu näidatud joonisel fig. 13 puksid 13 ja 14 oma sisemiste põrkhammastega 8 haakuvad pukside 4 väliste põrkhammastega 9 ja rõngad 5, 6 oma väliste põrkhammastega 11 haakuvad pukside 4 sisemiste põrkhammastega 10. Vedru 7 mõjub pidevalt sisemistele otstele rõngastest 5 ja 6, mis püüavad pööratavate osade põrkhambaid. Pöördliigendi osade ühenduses olevate põrkhammaste suund valitakse selliselt, et kui telg 3 liigub koos rõngastega 5 ja 6 päripäeva (kui kangimehhanism liigub koormuse all), siis põrkmehhanism rõngaste hambad 11 haakuvad pukside 4 põrkhammastega 10 ja tõmbavad viimased samas suunas, pannes need pöörlema kangi 2 aasasse surutud pukside 13 ja 14 ning põrkhammaste 9 suhtes. pukside 4 libisemine pukside 13 ja 14 hammaste 9 suhtes, mille tulemusena puksid 4 nihkuvad aksiaalsuunas pöördeliigendi keskpunkti suunas ja suruvad kokku vedru 7 Kui telg 3 liigub vastupäeva ( hoovamehhanismi liikumise ajal ilma koormuseta) libisevad puksid 4 põrkliigendites rõngastega 5 ja 6 ning fikseeritakse kangi 2 noa suhtes. Seega tagab pöördeliigendi konstruktsioon ühe- pukside 4 tsükliline pöörlemine telje 3 vastupidise pöörlemise ajal, mis tagab telje välispinna ja puksi sisepinna ühtlase kulumise. Kuid kangmehhanismi osade liigendühenduse kavandatud konstruktsioon ei võimalda kompenseerida selle töö ajal tekkivat tühimikku. 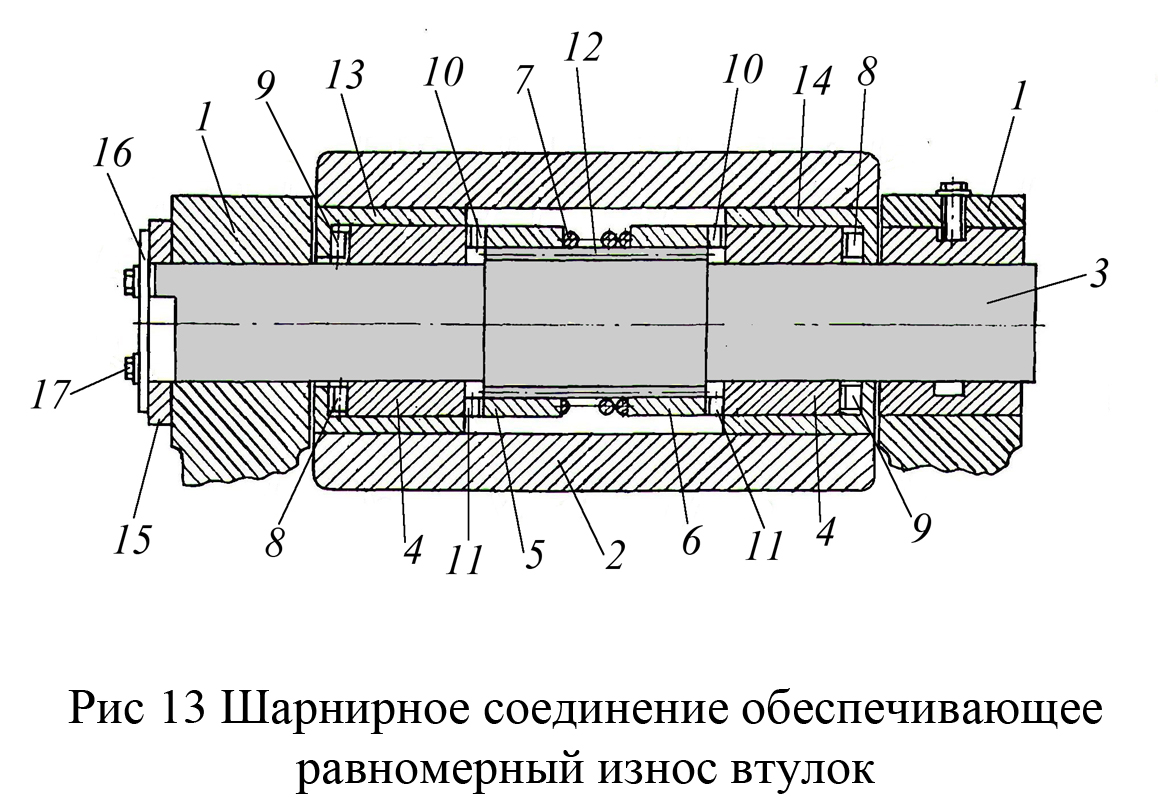 Joonisel fig. 14 on kujutatud kangmehhanismi osade liigendühenduse konstruktsioon, mis sarnaselt töötades ei võimalda mitte ainult pukside ühepoolset tsüklilist pöörlemist telje vastupidise pöörlemisega, vaid kompenseerib ka telje kulumist. töö ajal tekkivate pindade hõõrumine. See liigendliigend sisaldab ühendustelge 1, emasaasa 2, reguleerimispukse 3, isakõrva 4, isasaasa puks 5, kahte puksi 6 koos otsapõrkhammastega 7 ja välimiste põrkhammastega 9, vedru poolseibid 8, vaherõngast. hülss 10, vedru poolrõngad 11 ja mutter 12 telje 1 reguleerimiseks ja lukustamiseks. Puksid 6 on paigaldatud pöörlemisvõimalusega nii telje 1 kui ka isakõrva 4 hülsi 5 suhtes. Reguleerimishülsid. 3 on paigaldatud tõkkesobitusega emaskõrva 2 ja ühendustelje pukside 3 põskedesse. Põrkhambad 7 ja 9 on tehtud üksteise suhtes eri suundades, samuti vedru poolseibid 8 ja otsad. kevadised poolrõngad 11.
Joonisel fig. 14 on kujutatud kangmehhanismi osade liigendühenduse konstruktsioon, mis sarnaselt töötades ei võimalda mitte ainult pukside ühepoolset tsüklilist pöörlemist telje vastupidise pöörlemisega, vaid kompenseerib ka telje kulumist. töö ajal tekkivate pindade hõõrumine. See liigendliigend sisaldab ühendustelge 1, emasaasa 2, reguleerimispukse 3, isakõrva 4, isasaasa puks 5, kahte puksi 6 koos otsapõrkhammastega 7 ja välimiste põrkhammastega 9, vedru poolseibid 8, vaherõngast. hülss 10, vedru poolrõngad 11 ja mutter 12 telje 1 reguleerimiseks ja lukustamiseks. Puksid 6 on paigaldatud pöörlemisvõimalusega nii telje 1 kui ka isakõrva 4 hülsi 5 suhtes. Reguleerimishülsid. 3 on paigaldatud tõkkesobitusega emaskõrva 2 ja ühendustelje pukside 3 põskedesse. Põrkhambad 7 ja 9 on tehtud üksteise suhtes eri suundades, samuti vedru poolseibid 8 ja otsad. kevadised poolrõngad 11. 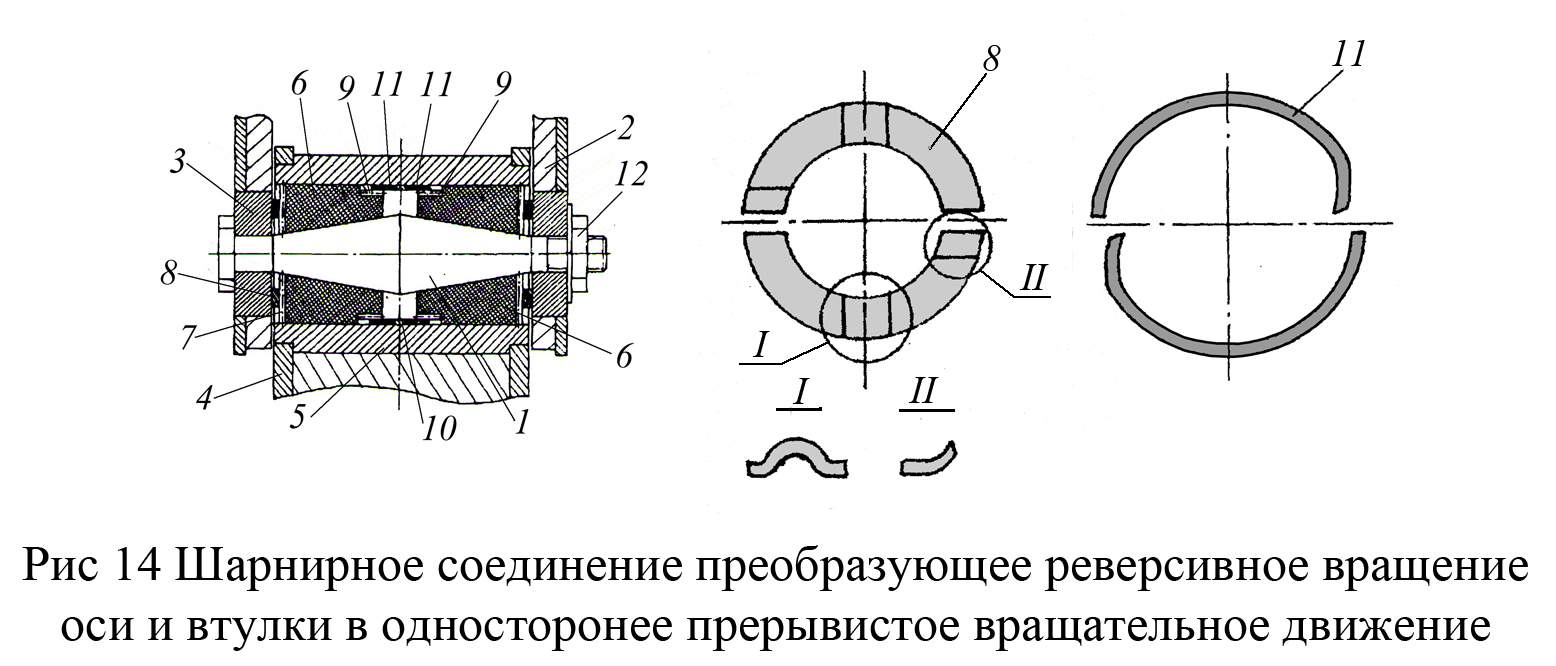 Pöörlemisseade töötab järgmiselt. Kui emasaasa 2 pööratakse isakõrva 4 suhtes ühes suunas, haakuvad vedru poolseibide 8 vabad otsad II pukside 6 põrkhammastega 7, andes viimastele liikumise, samal ajal kui vedru poolseibid 8 vabad otsad II. vedru poolrõngad 11 libisevad põrkhammaste 9 suhtes kesk- ja otsalukustusmehhanismi moodustavate osade põrkhammaste erinevate suundade tõttu. Sel juhul toimub hõõrdumise protsess isakõrva 4 pukside 6 välispinna ja pukside 5 sisepinna vahel. Kui emaskõrva 2 pööratakse isaskõrva 4 suhtes vastupidises suunas, vedru poolrõngaste 8 vabad otsad eralduvad põrkhammastest 7 ja libisevad edasise liikumise ajal üksteise suhtes ning vedru poolrõngaste 11 vabad otsad haarduvad sel ajal pukside 6 põrkhammastega 9, teavitades viimast liikumisest. Sel juhul toimub hõõrdeprotsess pukside 6 sisepinna ja ühendustelje 1 välispinna 1. pöördtelje osade vahel, muudetakse pöörlevaks liikumiseks ja hõõrdeprotsess toimub kahes tsoonis kordamööda. väliskõrva 4 pukside 6 ja pukside 5 vahel ning pukside 6 ja ühendustelje 1 vahel, st pukside 6 iga tööpinna suhtes. Selle tulemusena muudetakse pööratav hõõrdeprotsess hõõrdumise protsessiks. vahelduva pöörlemise protsess. Pöördliigendi töö ajal tekkinud tühimike kompenseerimine saavutatakse vedru poolseibide 8 painde I olemasolu tõttu, mis suruvad puksid 6 pöördeliigendi keskpunkti poole. Kui vahed on suured, kõrvaldatakse need mutteri 12 pingutamisega.
Pöörlemisseade töötab järgmiselt. Kui emasaasa 2 pööratakse isakõrva 4 suhtes ühes suunas, haakuvad vedru poolseibide 8 vabad otsad II pukside 6 põrkhammastega 7, andes viimastele liikumise, samal ajal kui vedru poolseibid 8 vabad otsad II. vedru poolrõngad 11 libisevad põrkhammaste 9 suhtes kesk- ja otsalukustusmehhanismi moodustavate osade põrkhammaste erinevate suundade tõttu. Sel juhul toimub hõõrdumise protsess isakõrva 4 pukside 6 välispinna ja pukside 5 sisepinna vahel. Kui emaskõrva 2 pööratakse isaskõrva 4 suhtes vastupidises suunas, vedru poolrõngaste 8 vabad otsad eralduvad põrkhammastest 7 ja libisevad edasise liikumise ajal üksteise suhtes ning vedru poolrõngaste 11 vabad otsad haarduvad sel ajal pukside 6 põrkhammastega 9, teavitades viimast liikumisest. Sel juhul toimub hõõrdeprotsess pukside 6 sisepinna ja ühendustelje 1 välispinna 1. pöördtelje osade vahel, muudetakse pöörlevaks liikumiseks ja hõõrdeprotsess toimub kahes tsoonis kordamööda. väliskõrva 4 pukside 6 ja pukside 5 vahel ning pukside 6 ja ühendustelje 1 vahel, st pukside 6 iga tööpinna suhtes. Selle tulemusena muudetakse pööratav hõõrdeprotsess hõõrdumise protsessiks. vahelduva pöörlemise protsess. Pöördliigendi töö ajal tekkinud tühimike kompenseerimine saavutatakse vedru poolseibide 8 painde I olemasolu tõttu, mis suruvad puksid 6 pöördeliigendi keskpunkti poole. Kui vahed on suured, kõrvaldatakse need mutteri 12 pingutamisega. 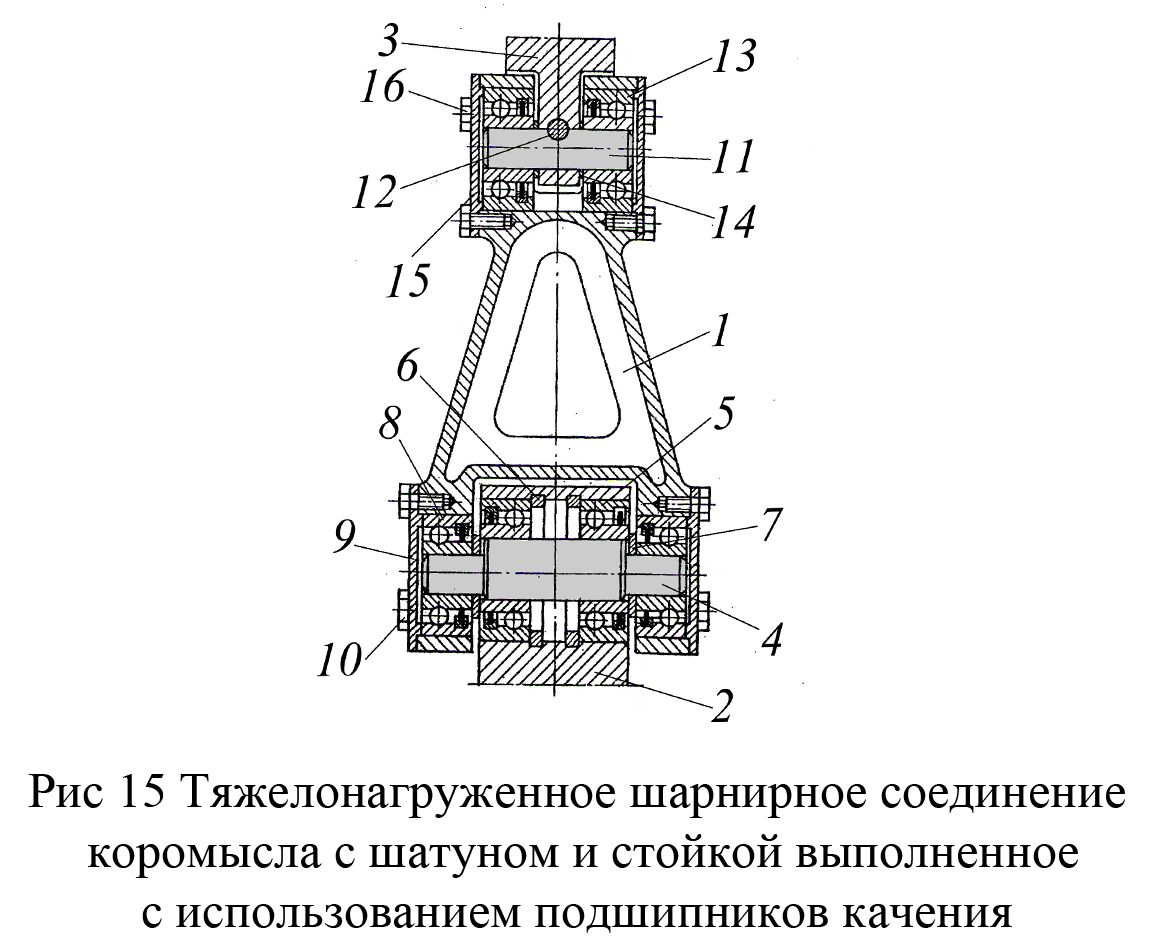 Kangimehhanismide osade pöördeliigendite tühimike kõrvaldamiseks ja seeläbi nende täpse liikumise tagamiseks paigaldatakse pöördeliigendi ühendustelje ja ühenduse osades olevate aukude vahele libisevate hülside asemel kuul- ja rull-laagrid. Joonisel fig. 15 on kujutatud nookuri tugevalt koormatud pöördliigendid koos ühendusvarda ja hammaslatiga, mis on valmistatud kuullaagritest. Nookur 1 on telje 4 abil pööratavalt ühendatud hammaslatiga 2, mille keskossa on paigaldatud kaks kuullaagrit 5, mille välimised rõngad on aksiaalsuunas kinnitatud vedrurõngaste 6 abil ja sisemised rõngad toetuvad seibidele 7, mis on kinnitatud telje 6 tihvtidele paigaldatud kuullaagrite 8 sisemiste rõngaste abil, sel juhul asuvad laagrite välimised rõngad 8 nookuri kahvli aukudes. hoob 1 ja on kinnitatud katetega 9, mis on kinnitatud nookurile poltidega 10. klambri 1 avasse ja surutakse katetega 15, mis on kinnitatud poltidega 16, samas kui ühendusvarda 3 silma otste vahel ja laagrite 13 siserõngad, kompensatsiooniseibid 14 on paigaldatud.
Kangimehhanismide osade pöördeliigendite tühimike kõrvaldamiseks ja seeläbi nende täpse liikumise tagamiseks paigaldatakse pöördeliigendi ühendustelje ja ühenduse osades olevate aukude vahele libisevate hülside asemel kuul- ja rull-laagrid. Joonisel fig. 15 on kujutatud nookuri tugevalt koormatud pöördliigendid koos ühendusvarda ja hammaslatiga, mis on valmistatud kuullaagritest. Nookur 1 on telje 4 abil pööratavalt ühendatud hammaslatiga 2, mille keskossa on paigaldatud kaks kuullaagrit 5, mille välimised rõngad on aksiaalsuunas kinnitatud vedrurõngaste 6 abil ja sisemised rõngad toetuvad seibidele 7, mis on kinnitatud telje 6 tihvtidele paigaldatud kuullaagrite 8 sisemiste rõngaste abil, sel juhul asuvad laagrite välimised rõngad 8 nookuri kahvli aukudes. hoob 1 ja on kinnitatud katetega 9, mis on kinnitatud nookurile poltidega 10. klambri 1 avasse ja surutakse katetega 15, mis on kinnitatud poltidega 16, samas kui ühendusvarda 3 silma otste vahel ja laagrite 13 siserõngad, kompensatsiooniseibid 14 on paigaldatud. 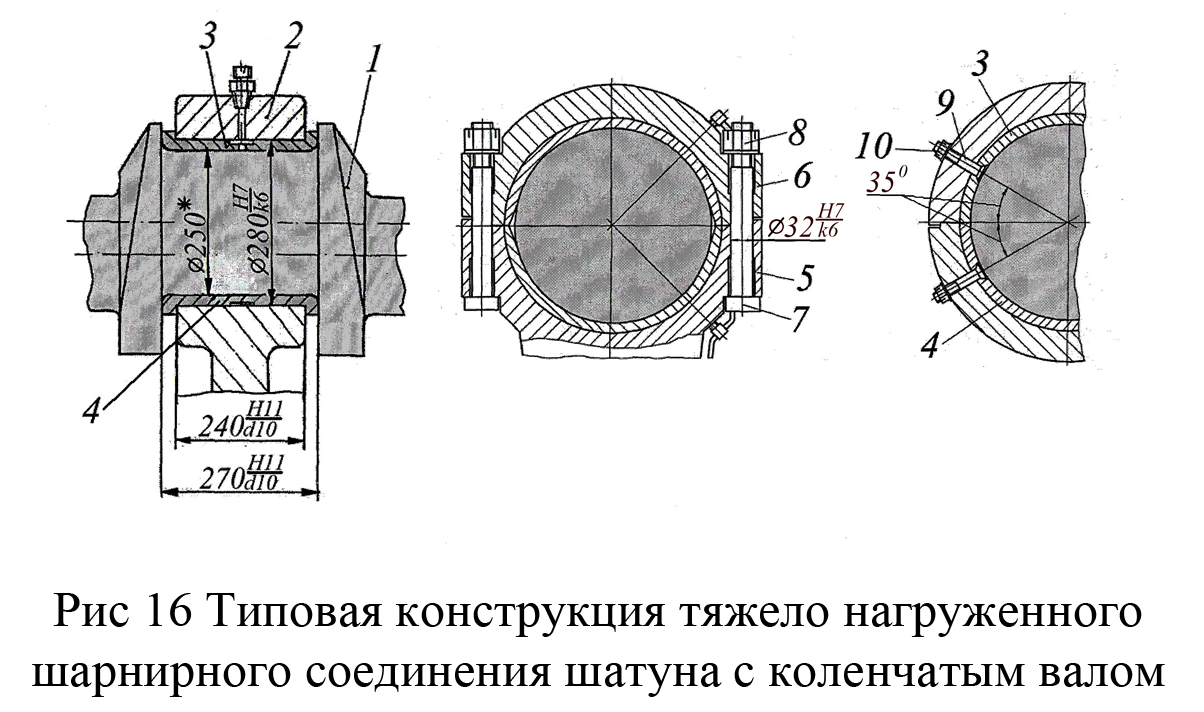 Veelgi vastutustundlikum ja mitte vähem koormatud väntmehhanismi pöördliigend, mis on kõige sagedamini kasutatav kangmehhanismide tüüp, on ühendusvarda ühendamine juhtiva väntvõlli või ekstsentrilise võlliga. Joonisel fig. 16 on kujutatud tüüpilist konstruktsiooni tugevalt koormatud ühendusvardaga ühendamiseks väntvõll. See pöördliigend koosneb väntvõllist 1, ühendusvardast 2, mille kate 6 on ühendatud selle korpuseosaga 5 lukustusühenduse ja kinnituspoltide 7 abil, mis on kontrollitud jõuga pingutatud ristmutritega 8, samas kui vooderdised 3 ja 4 on kinnitatud kruvidega 9 ja enne väntvõlliga ühendusvarda lõplikku kokkupanekut kraabitakse, et luua nende ja väntvõlli võlli vahele kontaktpind. Radiaalne kliirens vooderdiste ja väntvõlli kahvli vahel määratakse arvutuste, vt töö või sarnaste mehhanismide projekteerimise kogemuse põhjal. Vooderdiste õlgade otste ja väntvõlli põskede vaheline pilu määratakse sõltuvalt väntmehhanismi liuguri juhikute konstruktsioonist ja nende reguleerimise võimalusest (otsa pilu suurus, mis määratakse kindlaks näidatud sobivuste järgi joonisel 17 on seatud ühendama ühendusvarda mitme asendiga külmsuunamismasina AB 1822 väntvõlliga).
Veelgi vastutustundlikum ja mitte vähem koormatud väntmehhanismi pöördliigend, mis on kõige sagedamini kasutatav kangmehhanismide tüüp, on ühendusvarda ühendamine juhtiva väntvõlli või ekstsentrilise võlliga. Joonisel fig. 16 on kujutatud tüüpilist konstruktsiooni tugevalt koormatud ühendusvardaga ühendamiseks väntvõll. See pöördliigend koosneb väntvõllist 1, ühendusvardast 2, mille kate 6 on ühendatud selle korpuseosaga 5 lukustusühenduse ja kinnituspoltide 7 abil, mis on kontrollitud jõuga pingutatud ristmutritega 8, samas kui vooderdised 3 ja 4 on kinnitatud kruvidega 9 ja enne väntvõlliga ühendusvarda lõplikku kokkupanekut kraabitakse, et luua nende ja väntvõlli võlli vahele kontaktpind. Radiaalne kliirens vooderdiste ja väntvõlli kahvli vahel määratakse arvutuste, vt töö või sarnaste mehhanismide projekteerimise kogemuse põhjal. Vooderdiste õlgade otste ja väntvõlli põskede vaheline pilu määratakse sõltuvalt väntmehhanismi liuguri juhikute konstruktsioonist ja nende reguleerimise võimalusest (otsa pilu suurus, mis määratakse kindlaks näidatud sobivuste järgi joonisel 17 on seatud ühendama ühendusvarda mitme asendiga külmsuunamismasina AB 1822 väntvõlliga).
Liugelaagrite baasil valmistatud kangmehhanismide pöördliigendid töötavad poolvedela hõõrdumise tingimustes. Kahjuks puudub teaduslikult põhjendatud teooria, mis kirjeldaks liugelaagrite poolvedel- ja poolkuivhõõrdumise protsessi ning puudub ka teaduslikult põhjendatud meetod nende arvutamiseks.

 Poolvedel hõõrderežiimis töötavate liugelaagrite kasutamise näide on näidatud joonisel fig. 17, millel on kujutatud külmsuunalise masina väntvõll. 125 t.s.
Poolvedel hõõrderežiimis töötavate liugelaagrite kasutamise näide on näidatud joonisel fig. 17, millel on kujutatud külmsuunalise masina väntvõll. 125 t.s.
 Väntvõll 1, mille peamised tihvtid on paigaldatud teljekastides 3 asuvatele pronkspuksidele 2, on paigaldatud külmsuunamismasina voodi 4 avasse. Remondi ajal kokkupanemise ja lahtivõtmise hõlbustamiseks on teljepuksid 3 tehtud alahinnatult piki istmepinda 180 kraadise nurga all ning teljepukside 3 sobivuse tühimiku kõrvaldamiseks on kiilud 8 koos reguleerimispoltidega 9 raami 4 ava, kusjuures iga kiilu 1 välispind on töödeldud koos kasti 4 aluspinnaga ja monteerimisel kasutatakse neid ainult komplektina. Väntvõlli 1 vasakpoolsesse otsa on tangentsiaalse võtmeava abil, mis koosneb kiilvõtmete komplektist 11, 12 ja pidevast tangentsiaalsest võtmest (pole näidatud joonisel 17), paigaldatud hooratas 10, mis on kinnitatud ots seibiga 14. Väntvõlli paremasse otsa paigaldatakse see sulgvõtme 16 abil, nukkvõlli ajami hammasratas 15, mis on kinnitatud otsast seibiga 19. Määrdeaine lekkimise vältimiseks teljepukside 3 peamiste liugelaagrite välisotste küljelt on paigaldatud tihenditega kaaned 7. Vahe reguleerimiseks S
pukside 2 õlgade otsatasapindade ja väntvõlli 1 põskede vahel (vt joonis 17, vaade A), teljepukside äärikute 3 ja nende kontakttasandi vahel raamis 4 mõõtmetega seibide komplekt 17 on paigaldatud kokkupandav ühendusvarras 6, mis koosneb korpusest ja kattest, mille kaudu juhitakse liitmiku 20 abil määrdeaine vooderdiste ja väntvõlli väntvõlli kaela vahelisse radiaalsesse pilusse, puurides ühendusvarda kaanesse 6 , välissooned vooderdis 5 ja radiaalne puurimine neisse.
Väntvõll 1, mille peamised tihvtid on paigaldatud teljekastides 3 asuvatele pronkspuksidele 2, on paigaldatud külmsuunamismasina voodi 4 avasse. Remondi ajal kokkupanemise ja lahtivõtmise hõlbustamiseks on teljepuksid 3 tehtud alahinnatult piki istmepinda 180 kraadise nurga all ning teljepukside 3 sobivuse tühimiku kõrvaldamiseks on kiilud 8 koos reguleerimispoltidega 9 raami 4 ava, kusjuures iga kiilu 1 välispind on töödeldud koos kasti 4 aluspinnaga ja monteerimisel kasutatakse neid ainult komplektina. Väntvõlli 1 vasakpoolsesse otsa on tangentsiaalse võtmeava abil, mis koosneb kiilvõtmete komplektist 11, 12 ja pidevast tangentsiaalsest võtmest (pole näidatud joonisel 17), paigaldatud hooratas 10, mis on kinnitatud ots seibiga 14. Väntvõlli paremasse otsa paigaldatakse see sulgvõtme 16 abil, nukkvõlli ajami hammasratas 15, mis on kinnitatud otsast seibiga 19. Määrdeaine lekkimise vältimiseks teljepukside 3 peamiste liugelaagrite välisotste küljelt on paigaldatud tihenditega kaaned 7. Vahe reguleerimiseks S
pukside 2 õlgade otsatasapindade ja väntvõlli 1 põskede vahel (vt joonis 17, vaade A), teljepukside äärikute 3 ja nende kontakttasandi vahel raamis 4 mõõtmetega seibide komplekt 17 on paigaldatud kokkupandav ühendusvarras 6, mis koosneb korpusest ja kattest, mille kaudu juhitakse liitmiku 20 abil määrdeaine vooderdiste ja väntvõlli väntvõlli kaela vahelisse radiaalsesse pilusse, puurides ühendusvarda kaanesse 6 , välissooned vooderdis 5 ja radiaalne puurimine neisse.
Määrdeaine tarnimine puksidele 2, väntvõlli 1 peamistele tihvtidele, viiakse läbi karbis 3 oleva ava, millesse on keermele paigaldatud piklik liitmik 18, mis läbib raami 4 vastavat puuri. Sel juhul siseneb määrimine puksi 2 ja väntvõlli 1 põhivõlli vahele jäävasse radiaalsesse pilusse läbi hülsi 2 välimise soone ja selles oleva kahe radiaalse puuri, mis asuvad vertikaaltelje suhtes 30-kraadise nurga all. Vaadeldava väntvõlli liugelaagrite omadused on toodud kaardil. 2.
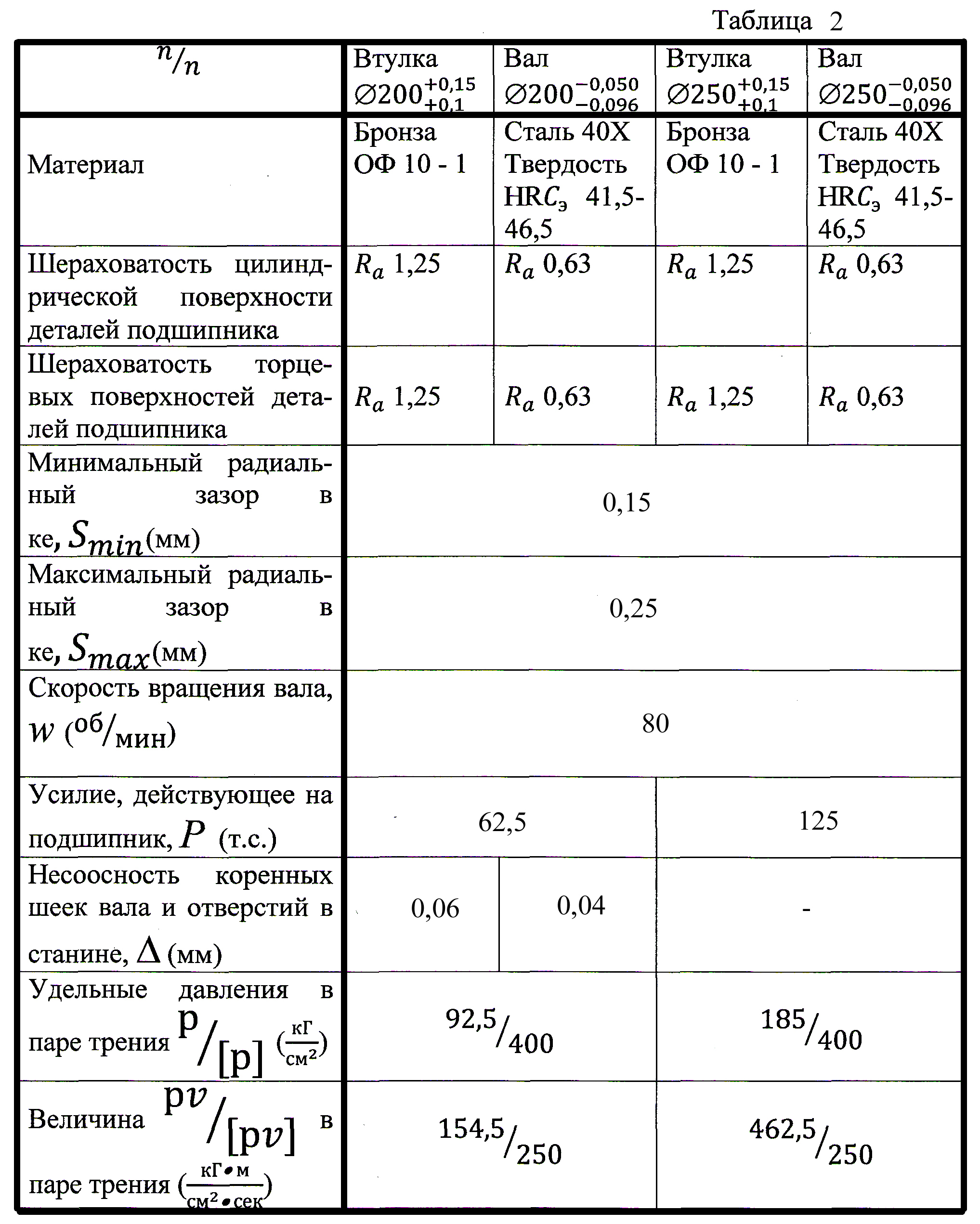 Tabelis toodud väntvõlli laagrite näitajate p ja pv analüüs näitab, et väntvõlli laagrite laagrite 5 töötingimusi iseloomustab indikaatori pv lubatava väärtuse märkimisväärne ületamine, mis vaatamata mõnele selle indikaatori tavapärasus näitab, et sellel laagril on väiksem ressurss. Seega, kuna seda indikaatorit ei ole võimalik konstruktiivselt parandada ei vooderdise ja vastavalt väntvõlli pikkuse ega ka vooderdiste materjali vahetamise tõttu, tuleb esiteks suurendada mahtu. sellesse hõõrdepaari tarnitavast impulssmäärdeainest ja teiseks projekteerida ühendusväntvõll 1 koos ühendusvardaga 6 maksimaalse hooldatavuse tasemega, st. pakkuda mugavat juurdepääsu kiire lahtivõtmine ja sellele järgnev selle väntvõlli tugede kokkupanek, mis saavutatakse teljepukside 3 kinnitamisega raami 4 aukudesse kiilude 8 abil.
Tabelis toodud väntvõlli laagrite näitajate p ja pv analüüs näitab, et väntvõlli laagrite laagrite 5 töötingimusi iseloomustab indikaatori pv lubatava väärtuse märkimisväärne ületamine, mis vaatamata mõnele selle indikaatori tavapärasus näitab, et sellel laagril on väiksem ressurss. Seega, kuna seda indikaatorit ei ole võimalik konstruktiivselt parandada ei vooderdise ja vastavalt väntvõlli pikkuse ega ka vooderdiste materjali vahetamise tõttu, tuleb esiteks suurendada mahtu. sellesse hõõrdepaari tarnitavast impulssmäärdeainest ja teiseks projekteerida ühendusväntvõll 1 koos ühendusvardaga 6 maksimaalse hooldatavuse tasemega, st. pakkuda mugavat juurdepääsu kiire lahtivõtmine ja sellele järgnev selle väntvõlli tugede kokkupanek, mis saavutatakse teljepukside 3 kinnitamisega raami 4 aukudesse kiilude 8 abil.
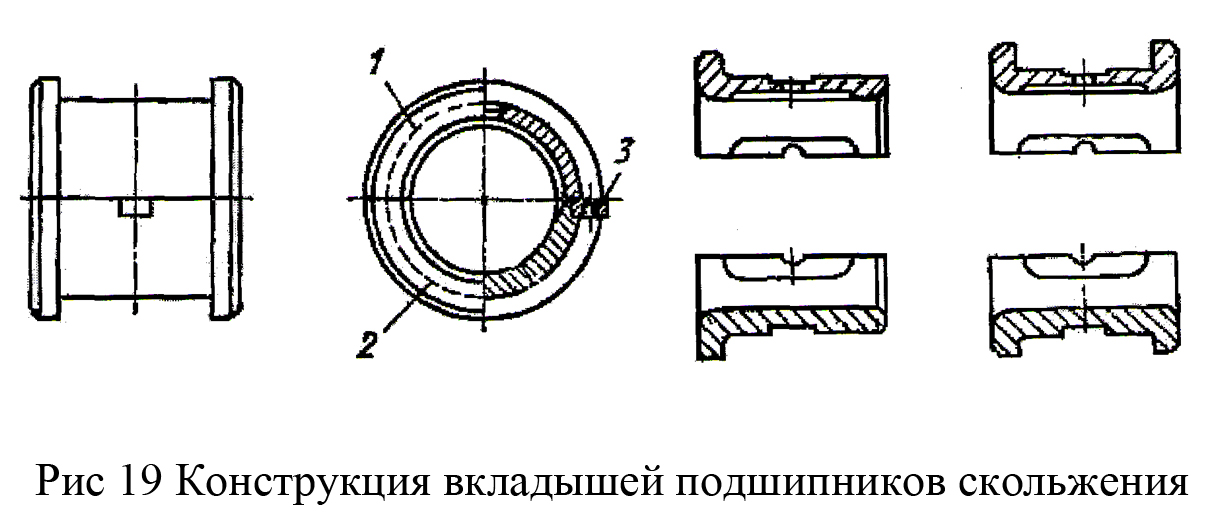
Metallpukside peamised mõõtmed on määratletud standardiga GOST 1978-81, mille kohaselt võivad puksid olla siledad ja kraega (vt joon. 18) ning GOST 11525-82, mis kehtib ühes tükis liugelaagrikorpuste siledatele metallpuksidele. vastavalt standarditele GOST 11521-82, GOST 11522 -82, GOST 11523-82, GOST 11524-82.
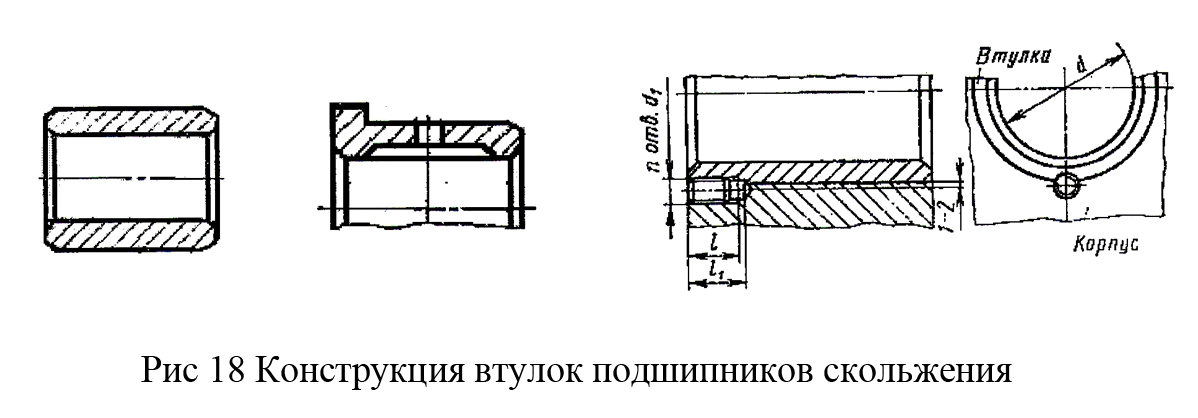 Jaotatud korpusega liugelaagrite pukside konstruktsioon ja mõõtmed määratakse GOST 11611-82 järgi (vt joonis 19).
Jaotatud korpusega liugelaagrite pukside konstruktsioon ja mõõtmed määratakse GOST 11611-82 järgi (vt joonis 19).
Liugelaagrite hülsside materjalidena kasutatakse mitmesuguseid hõõrdumisevastaseid materjale:
- pronks (tina, tina-plii, tina-plii-tsink, alumiinium-raud),
- hõõrdumisvastased malmid (AChK, AChS),
-babits (kõrge tinasisaldusega, madala tinasisaldusega, plii-tina, tinavaba, koodmium, alumiinium-tina),
- alumiiniumisulamid (AL, AK),
- vasesulamid,
- metallkeraamika,
- mittemetallilised materjalid (teksoliit, polükarbonaat, kaprolon, teflon),
- süsinikgrafiit.
Poolvedel- ja poolkuivhõõrderežiimil töötavatel liuglaagritel on määravateks näitajateks laagripinna läbimõõt ja pikkus, mille muutumine suurenemise või vähenemise suunas võimaldab projekteerida kriteeriumidele vastava laagri. R
Ja pv
(vt punkt 5). Samas tuleb aga teada, et laagri laagripinna pikkust oluliselt suurendada ei tohi, kuna see toob kaasa karmimad nõuded võlli kandepindade joondamisele ja nõutava joonduse tagamata jätmise. põhjustab liughülsi servade enneaegset kulumist, selle kandepinna vähenemist ja selle tulemusena määrdeaine lekke suurenemist läbi suurenenud kliirensi. Näide läbimõõduga võlli nihkenõuete vajalikust pingutamisest d
= 100 mm, tugede vahekaugusega L
= 500-600 mm ning võlli ja hülsi vahe, mis on määratud sobivusega H8 / f8, olenevalt liugelaagri kandepinna pikkusest l on toodud tab. 3.
Tabel 3
 Samuti tuleb meeles pidada, et pv väärtuse vähenemine erirõhu languse tõttu R
, suurendades võlli läbimõõtu, ei anna see tulemust, kuna võlli läbimõõdu suurenemisega suureneb lineaarkiirus proportsionaalselt V
. Seega, kui võlli tugi, kuhu liugelaager on paigaldatud, ei vasta kriteeriumidele R
Ja pv,
ja see on nii tugevalt koormatud kiirajamite puhul, tuleb laagrihülsi jaoks kasutada kas kallimat, kuid suuremate omadustega materjali R
Ja pv
, või luua laagri tööks vedeliku hõõrdumise tingimused, mis samuti raskendab toe konstruktsiooni. Ligelaagri usaldusväärse ja vastupidava töö tagamisel mängib olulist rolli hõõrdepaari võllile määrdeaine tarnimise punkti (ava) kavandatud asukoht - puks laagritoele mõjuva radiaaljõu toimesuuna suhtes. .
Samuti tuleb meeles pidada, et pv väärtuse vähenemine erirõhu languse tõttu R
, suurendades võlli läbimõõtu, ei anna see tulemust, kuna võlli läbimõõdu suurenemisega suureneb lineaarkiirus proportsionaalselt V
. Seega, kui võlli tugi, kuhu liugelaager on paigaldatud, ei vasta kriteeriumidele R
Ja pv,
ja see on nii tugevalt koormatud kiirajamite puhul, tuleb laagrihülsi jaoks kasutada kas kallimat, kuid suuremate omadustega materjali R
Ja pv
, või luua laagri tööks vedeliku hõõrdumise tingimused, mis samuti raskendab toe konstruktsiooni. Ligelaagri usaldusväärse ja vastupidava töö tagamisel mängib olulist rolli hõõrdepaari võllile määrdeaine tarnimise punkti (ava) kavandatud asukoht - puks laagritoele mõjuva radiaaljõu toimesuuna suhtes. .
Määrdeaine etteandmise ava õige nurgaasend radiaalkoormuse mõjutelje suhtes on 30–45 kraadi nurk mõlemal küljel koormuse suhtes (vt joonis 20a). Kui määrida läbi keskne auk võlli, sellel on piki perimeetrit kolm võrdsete vahedega radiaalset määrimisava (vt joonis 20b). Kui hülsslaager pöörleb, toimub määrimine läbi võlli keskava ja radiaalse määrdeava, nagu on näidatud joonisel fig. 20. sajandil  Ligelaagri oluline parameeter, nagu juba mainitud, on lõtk võlli-rummu ühenduses, eriti suure koormusega ja kiirete ajamite puhul. Seetõttu näeb sellistes kriitilistes laagrites sissetulevate osade konstruktsioon tingimata ette võimaluse reguleerida radiaalset kliirensit nii esmase montaaži kui ka kasutuselevõtu ajal ning hõõrdpindade kulumise kompenseerimiseks töö ajal, paigaldades lehest valmistatud tihendite komplekti 1 messing paksusega 0,05 mm (vt joon. joon. 21). Samal ajal jäetakse võlli pinna ja tihendite vahele tühimik. S
= 0,2-0,5 mm.
Ligelaagri oluline parameeter, nagu juba mainitud, on lõtk võlli-rummu ühenduses, eriti suure koormusega ja kiirete ajamite puhul. Seetõttu näeb sellistes kriitilistes laagrites sissetulevate osade konstruktsioon tingimata ette võimaluse reguleerida radiaalset kliirensit nii esmase montaaži kui ka kasutuselevõtu ajal ning hõõrdpindade kulumise kompenseerimiseks töö ajal, paigaldades lehest valmistatud tihendite komplekti 1 messing paksusega 0,05 mm (vt joon. joon. 21). Samal ajal jäetakse võlli pinna ja tihendite vahele tühimik. S
= 0,2-0,5 mm.

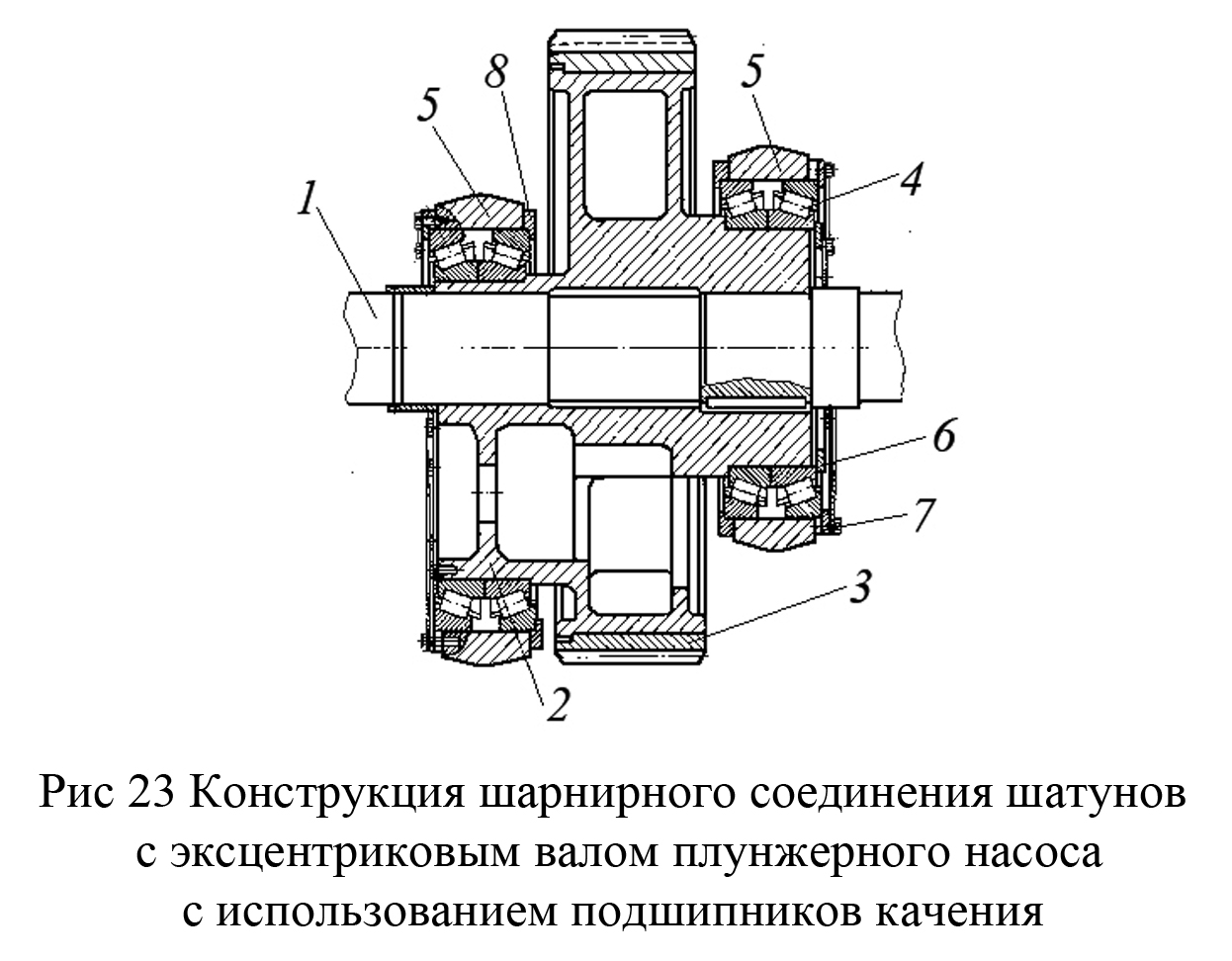
Pilu täpse reguleerimise ja võlli telje vajaliku asukoha tagamiseks ühendatakse varrukaga liugelaagris piki koonusekujulist pinda võll, mille puhul on hülsil võimalik telgsuunas sunniviisiline liikumine kontaktis oleva mutri abil. seda. (vt joonis 22a). Sellise kliirensi reguleerimise võimaluse saab saavutada, tehes liugelaagripuksi välispinna välise koonilise pinnaga ja korpuse, millesse see on paigaldatud, koonusekujulise pinna (vt joonis 22b). Reguleerimisulatuse suurendamiseks ja võllitoele paremate summutusomaduste andmiseks lõigatakse liugelaagri puksid või kontakti korpuse pinnaga ainult kitsaste eenditega, millel on silindriline välispind (vt joonis 22c). 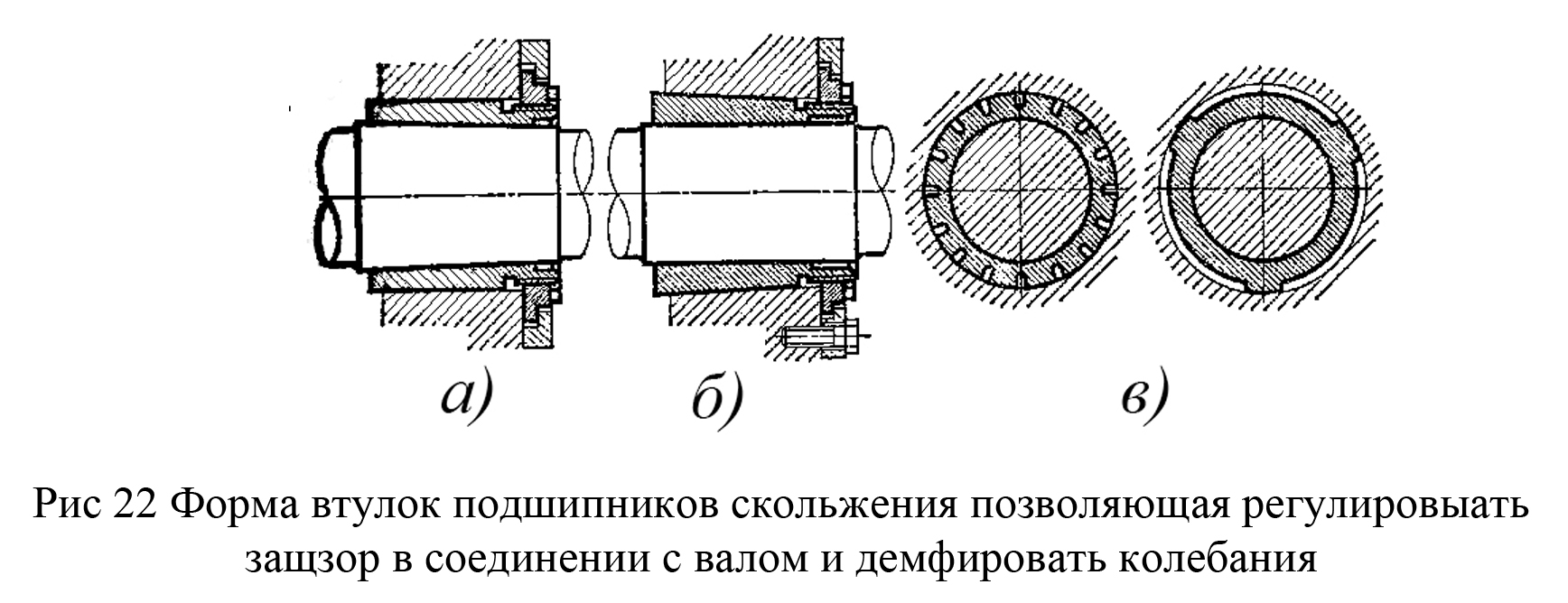 Mõnel juhul, eriti kiirete väntmehhanismide puhul, ühendatakse ühendusvarras väntvõlliga kuul- ja rull-laagrite abil. Joonisel 23 on kujutatud koonusrull-laagreid kasutava topeltkolb-pumba väntvõlliga ühendusvarraste konstruktsiooni valmistatakse rattarumm 2, millele surutakse rõngashammas 3, mis on ühendatud ekstsentrilise võlli pöörlemisajamiga. Ekstsentriku rummu 2 mõlemal istmepinnal on koonusrull-laagrite komplektide 4 sisemised rõngad surutud ja kinnitatud aksiaalsuunas katete 6 abil, samas kui nende minimaalse kliirensiga välisrõngad paigaldatakse aluse avadesse. kolvipumba ühendusvardad 5. Rull-laagrite 4 radiaalse kliirensi väärtust reguleerivad otsakorgid 7 ja 8, mis on kinnitatud ühendusvarraste 5 külge.
Mõnel juhul, eriti kiirete väntmehhanismide puhul, ühendatakse ühendusvarras väntvõlliga kuul- ja rull-laagrite abil. Joonisel 23 on kujutatud koonusrull-laagreid kasutava topeltkolb-pumba väntvõlliga ühendusvarraste konstruktsiooni valmistatakse rattarumm 2, millele surutakse rõngashammas 3, mis on ühendatud ekstsentrilise võlli pöörlemisajamiga. Ekstsentriku rummu 2 mõlemal istmepinnal on koonusrull-laagrite komplektide 4 sisemised rõngad surutud ja kinnitatud aksiaalsuunas katete 6 abil, samas kui nende minimaalse kliirensiga välisrõngad paigaldatakse aluse avadesse. kolvipumba ühendusvardad 5. Rull-laagrite 4 radiaalse kliirensi väärtust reguleerivad otsakorgid 7 ja 8, mis on kinnitatud ühendusvarraste 5 külge.
KIRJANDUS.
1. Ignatiev N. P. Azovi projekteerimise alused 2011.
2. Ignatjev N.P. Mehhanismide projekteerimine. Aasov 2015
Viitejuhendis "Mehhanismide disain" lisaks kangmehhanismide liigendliigendite konstruktsiooni näidetele sisaldab see:
– disaininäited ja soovitused hoob- ja nukkmehhanismide, katkendliku toimega mehhanismide ja kombineeritud mehhanismide kasutamiseks,
– näiteid disain ja soovitused ülalnimetatud mehhanismide peamiste osade tüüpide kasutamiseks: väntvõllid, ühendusvardad, liugurid, hoovad ja noobid ning nukid,
- soovitused mehhanismi ajami tüübi valimiseks ja selle rakendamise näited,
– mehhanismide arvutused,
- nukk-automaatse masina töö tsüklogrammi koostamise näide,
– mehhanismide kavandamise tehnika,
– soovitused mehhanismidele ja nende tüüpilistele osadele täpsusnõuete määramiseks,
– originaalse disainiga mehhanismi projekteerimise näide
Ostmiseks täisversioon artiklid lisavad selle ostukorvi,
Artikli täisversiooni maksumus on 50 rubla.
otsingutulemused
Leitud tulemused: 38 (0,79 sek)
Tasuta juurdepääs
Piiratud ligipääs
Litsentsi uuendamine on täpsustamisel
1
Güroskoopiline efekt ehitusmaterjalide lihvimiseks mõeldud jooksikutes / I.G. Bogatskaja, Borovskikh // Ehituse mehhaniseerimine. - 2013 .- Nr 12 .- Lk 20-22
Vaadeldakse güroskoopilise momendi mõju jooksjate tööle ja nende optimaalse disaini loomist.
2
LIIGENDRATADE ÜLDSTABIILSUSE ANALÜÜS...
KHARKOV AUTO- JA TEETEINSTITUUT
Lõputöös käsitletakse kirjanduslike andmete ning kodu- ja välismaiste proovide katsete tulemuste aruannete põhjal kõige ohtlikumaid liigendratastega sõidukite stabiilsuse rikkumise juhtumeid.
Liigendtraktori kõverjoonelise liikumise ajal Traktori kõverjoonelise liikumise korral, mille puhul liigendtelg muutuva pöördenurgaga, liigub iga sektsioon ümber oma hetkelise pöörlemiskeskme.
Eelvaade: LIIGENDRATTASMASINATE ÜLDSTABIILSUSE ANALÜÜS.pdf (0,0 Mb)3
POOLPAIGALDATUD PÖÖRDARA PÕHITALLE KOORMUSE MÄÄRAMINE / V.V. Vasilenko, Vasilenko // Voroneži Riikliku Põllumajandusülikooli bülletään. - 2014 .- Nr 1-2 .- Lk 77-79
Selgitatakse adra ümbermineku mehhanismi tööd ja pöördadra kaugtala koormuse arvutamise meetodit. On toodud näide, mille tõttu saab kaugtala koormust vähendada, määratakse paindemoment selle tala ohtlikus lõigus.
4
Masinad teede ja lennuväljade ehitamiseks ja hooldamiseks: ...
Sib. föder. ülikool
Vaadeldakse teede ja lennuväljade ehitamiseks ja hooldamiseks kasutatavate masinate ajamite, konstruktsioonide ja tööorganite uurimise ja projekteerimise teoreetilisi sätteid ja praktilisi aspekte.
Y2 telg kulgeb piki õla pikitelge ja Z2 telg läbib õla ja šassii pöördeosa ühendava hinge O2 telge. Algasendis ühtib Y2 telg suunaga Y1 teljega. Riis. 3.7.
Eelvaade: masinad teede ja lennuväljade ehitamiseks ja hooldamiseks. Uuring, arvutamine, kujundamise õpetus (UMO tempel).pdf (0,9 Mb)5
nr 3 [Brjanski Riikliku Tehnikaülikooli bülletään, 2013]
Kajastuvad masinaehitustööstuse tehnoloogia ja seadmete, transpordi ja energeetika, matemaatilise modelleerimise ja infotehnoloogia, majanduse, tootmise korraldamise ja juhtimise, teaduse ja tehnoloogia sotsiaalfilosoofiliste aspektide uurimistöö tulemused.
Kraana-manipulaatori ajamite poolt välja töötatud tundmatud jõud liigendites τ määratakse liigendi vastava jõuteguri projitseerimise meetodil liigendi teljele . Koos võrranditega (6), (16-18) moodustavad nad tagasilöögi.
Eelvaade: Brjanski Riikliku Tehnikaülikooli bülletään nr 3 2013.pdf (0,7 Mb)6
nr 12 [Ehitamise mehhaniseerimine, 2013]
Ajakiri käsitleb ehitustööde mehhaniseerimise ja automatiseerimise küsimusi, tutvustab lugejatele arenenud tehnoloogiaid, kodu- ja välismaise tootmise paljutõotavaid masinaid ja seadmeid.
Lisaks asub mõnel jooksikul, näiteks märgveskil SM-365, Hooke'i liigendtelg rulli telje kohal, mis mõjutab negatiivselt inertsiaalsete ja güroskoopiliste jõudude kasutamist kasulikena.
Eelvaade: Ehituse mehhaniseerimine №12 2013.pdf (0,2 Mb)7
Õppige mehaanikat. toetust
Sib. föder. ülikool
Õpikus on välja toodud mehaanika põhimõisted, käsitletakse üksikasjalikult reegleid ja teoreeme teoreetilise mehaanika osadest "Staatika", "Kinemaatika", "Dünaamika", tuuakse näiteid ülesannete lahendamisest. Antakse lühiülevaade kursuse "Materjalide tugevus" teooriast, määratakse lähenemisviisid ja meetodid pinge-deformatsiooni oleku arvutamiseks, näited tüüpilistest arvutustest tugevuse ja jäikuse, konstruktsioonielementide stabiilsuse pinges (surve) ja tasapinnas. arvesse võetakse painutust, ekstsentrilist kokkusurumist ja stabiilsust.
Vastavalt sellele asendame toe äraviskamisel selle tegevuse reaktsiooniga RA, selles skeemis läbib tugede reaktsiooni toimejoon varda suunas liigendtelge.
Eelvaade: mehaanika õppejuhend (UMO tempel).pdf (2,4 Mb)8
MathCAD süsteemi kasutamine rakenduslike probleemide lahendamisel ...
Välja on toodud õppekavaga ette nähtud teoreetilise mehaanika kursuse osa "Staatika" põhisätted. Ülesannete lahendamisel kasutatakse vajadusel tarkvaratoodet MathCAD 2000. Enamik ülesandeid on võetud IV Meshchersky kogust.
Pöördsuunas fikseeritud silindriline tugi on silindriline liigend, mis on jäigalt kinnitatud kindlale pinnale. Sellise toe reaktsioon läbib hinge telge ja on selle teljega risti.
Eelvaade: MathCAD süsteemi kasutamine rakendusmehaanika ülesannete lahendamisel. Osa 2. Teoreetiline mehaanika. Staatikaõpetus.pdf (0,5 Mb)9
PNEUMAATILIST LASTE ÕPETAMISE TEOORIA JA MEETODID...
Käsiraamat on adresseeritud pneumaatilistest relvadest laskmise treeninguteooria uurimisele. Sisu paljastab väljaande ajalugu, sisaldab metoodilisi soovitusi õhkrelvadest laskmise õpetamiseks, loetelu viidetest kandideerimiseks. Lisainformatsioon, küsimusi, mida jälgida. Raamat on adresseeritud kooliõpetajatele, kõrgkoolide õppejõududele, täiendusõppe õpetajatele, treeneritele, pedagoogikaülikoolide üliõpilastele, lapsevanematele.
20 - risttala vedru; 21 - hinge telg; 22 - esivaate alus; 23 - esivaade; 24 - eesmise sihiku aluse mutter Püssi MP-512 mehhanismide skeem Joonis 17 Kuulid õhupüssist tulistamiseks Praegu kasutatakse Venemaal kahte tüüpi kuule ...
Eelvaade: PNEUMAATILISTEST RELVEST LASMISE ÕPETAMISE TEOORIA JA METOODIKA.pdf (0,6 Mb)10
Protsesside loogilis-dünaamilise spetsifikatsiooni kasutamine dünaamiliste süsteemide füüsiliste mudelite arvutipõhiseks realiseerimiseks / V.M. Shpakov // Kehaline kasvatus ülikoolides. - 2016 .- Nr 3 .- Lk 73-87
Käsitletakse nõudeid dünaamiliste süsteemide modelleerimisele suunatud protsesside modelleerimise arvutivahenditele füüsika õppimise eesmärgil. Lühidalt kirjeldatakse transitiivset loogilis-dünaamilist lähenemist protsesside spetsifikatsioonile. Kahe lihtsa dünaamilise süsteemi modelleerimise näited demonstreerivad protsesside loogilis-dünaamilise spetsifikatsiooni kasutamise eeliseid nii süsteemide füüsiliste mudelite realiseerimiseks mõeldud programmide väljatöötamise etapis kui ka mudelikatsete läbiviimisel ja nende tulemuste töötlemisel.
11
LENNUDROOM LAUAL / Antonov // Vasak.- 2015 .- nr 5 .- Lk 8-17
Noh, kui laud muutub aeg-ajalt lennuväljaks, mille kohal tiirutab tilluke lennuk - saab tõsisest tegevusest lahti rebida ja pausi teha. See on veelgi parem, kui see lennuk töötab kuuma ilmaga ventilaatorina (vt joonis 1).
12
Nr 5 [Lefty, 2015]
Asutatud 1972. aasta jaanuaris Peatoimetaja A.A. FIN. Ajakiri "Noor tehnik" sai tuntuks oma rakendustega "Lefty". Kui ajakiri ise oli teismeliste seas populaarne, siis taotlust tunnustasid ka täiskasvanud, kes avaldasid austust praktilisi nõuandeid ja soovitusi. Ükskõik kui targad ja professionaalselt koolitatud me nüüd ka poleks, on väga meeldiv naasta oma nooruspõlve ja vaadata läbi ajakirja Noor Tehnik ja selle rakendus ning samal ajal oma poega arvutist lahti rebida ja midagi looma õpetada. käte ja peaga. Ajakiri Levsha pole oma aktuaalsust kaotanud ka tänapäeval, mil üha enam inimesi pöördub tagasi iseseisva loovuse, praktilise tööoskuse juurde ning luua oma kätega midagi ilusat ja kasulikku.
5 4 2 11 3 1 12 4 14 6 4. Mudeli üksikasjad: 1 - lennurada, 2 - keskmast, 3 - hinge ike, 4 - hinge puks, 5 - masti kontakti isolaator, 6 - vastukaal, 7 - nöörid, 8 - liugkontakt, 9 - telg ...
Eelvaade: Lefty #5 2015.pdf (0,4 Mb)13
Agreecultural masinad.Agreecultural seadmed. Rubriik "Teraviljakombainid...
RIO PGSKHA
Põhiinfo ACROS kombaini kohta, selle seadistused, kombaini seadistused erinevateks töötingimusteks, hooldus, põhi võimalikud vead ja nende kõrvaldamise viisid, ohutusnõuded ja tuletõkkemeetmed.
Joonis 3.43 - Noaajami reguleerimise skeem: 1 - noapea; 2 - põsk; 3 - poldid; 4 - kangi pea; 5 - kang; 6 – kangi pea hinge telg; 7 - noapea hinge telg; 8-mutter Süsteemi lõikeseadme ajami hooldus ...
Eelvaade: Põllumajandusmasinad. Sektsioon Kombainid. Harvester ACROS..pdf (1,1 Mb)14
Põllumajandusmasinad (jaotis "Teraviljakombainid...
RIO PGSKHA
Põhiteave kombainide kohta, selle seadistused, kombaini seadistused erinevateks töötingimusteks, töökvaliteedi kontroll, Hooldus, peamised võimalikud rikked ja nende kõrvaldamise viisid, ohutusnõuded ja tuletõkkemeetmed.
Joonis 2.15 - Noaajami reguleerimise skeem: 1 - noapea; 2 - põsk; 3 - poldid; 4 - kangi pea; 5 - kang; 6 – kangi pea hinge telg; 7 - noapea hinge telg; 8-mutter 2.4.7 Noapea ja...
Eelvaade: Põllumajandusmasinad (jaotis Kombainid)..pdf (1,6 Mb)15
Harjutuse biomehaanika küsimustes ja vastustes
FGBOU VPO "SHGPU"
Hariduslikud ja metoodilised soovitused pakuvad materjali distsipliini "Biomehaanika" kohta. Soovitatav pedagoogiliste ülikoolide kehakultuuriteaduskondade statsionaarse ja osakoormusega õppevormide üliõpilastele, erialad: 050720.65 - kehaline kasvatus koos lisaerialaga; 032101.65 - kehakultuur ja sport; 050720.65 - kehakultuur; 032102.65 - puuetega inimeste kehakultuur (Adaptive kehakultuur), kehakultuuri ja spordi valdkonna spetsialistid.
Sellise toe reaktsioon läbib liigendtelge ja sellel võib olla mis tahes suund joonise tasapinnas (joonis nr 157 (d)). Sideme kogureaktsioon on vaja lahutada selle komponentideks Rx ja Ry koordinaattelgede suunas.
Eelvaade: Harjutuste biomehaanika küsimustes ja vastustes.pdf (0,3 Mb)16
Nr 5 [Modellidisainer, 2011]
seibid, 2 vedruseibid, 2 splindi, kokku 2 komplekti); 8 - käepideme telg (M10x170 naast, 4 M10 mutrit, 2 seibi, 2 vedruseibi, 2 splindi); 9 - käepide (toru Ш13х1,5 välise sälguga); 10 - tugiklambrite sidur (naast M10x160, 2 mutrit ...
Eelvaade: modellidisainer №5 2011.pdf (0,1 Mb)17
ANSYS. Kasutusjuhend
Moskva: DMK-Press
Raamatus käsitletakse kompleksse lõplike elementide meetodi (FEM) ANSYS rakendamist. Raamat sisaldab kompleksi üldist kirjeldust, teavet graafilise kasutajaliidese, kasutatavate lõplike elementide tüüpide, geomeetrilise mudeli ja lõplike elementide võrgu loomise meetodite kohta ning näiteid kompleksi kasutamisest. Materjali kirjeldus vastab ANSYS 9.0 kompleksi versioonile.
Kui KEYOPT(2) = 0, saab hing luku eemaldada (või kõrvaldada). Kui KEYOPT(2) = 1, on hinge telg lukustatud.
Eelvaade: ANSYS. User Manual.pdf (16,7 Mb)18
Metsatöömasinate pöörlevad töökehad. Mehaanika...
RO; nuga hinge telje suhtes; ] - liigendnoa nurkkiirendus - liigendnoa pöördenurk alates⋅ + rootori pöörlemiskeskust läbiva telje ja hinge telje suhtes ; Q,K,L,M,N on sõltuvad konstandid.
Eelvaade: metsamasinate pöörlevad tööorganid. Tööainega suhtlemise mehaanika Monograph.pdf (0,7 Mb)19
Metsanduse pöörlevad tööorganid. Kontseptsioon...
Monograafias on analüüsitud metsa- ja põllumasinate pöörlevate töökorpuste konstruktsioone ja parameetreid, mille põhjal on süsteemset lähenemist kasutades välja töötatud projekteerimiskontseptsioon. Esitatakse funktsionaalse analüüsi tulemused, tööorganite klassifikatsioon tööobjektiga suhtlemise tehnoloogilise meetodi järgi. Saadakse konstruktiivsete lahenduste otsimise algoritm. Pakutakse välja disaini põhiprintsiibid. Soovitatav metsa- ja põllumasinate projekteerijatele.
Haamrite liikumise analüüs näitab, et haamrite reaktsioonid ei kandu üle rootorile, kui haamri liigendtelg rootorile langeb kokku vasara pöörlemiskeskmega.
Eelvaade: Metsanduse pöörlevad tööorganid. Disainikontseptsiooni monograafia.pdf (0,9 Mb)20
nr 3 [Kehaline kasvatus ülikoolides, 2016]
See ajakiri on ainuke, mis hõlmab kõiki ülikoolis füüsika õpetamise aktuaalseid küsimusi ning loodetavasti saab sellest SRÜ riikide ülikoolide füüsikaosakondade peamine suhtlusvahend. Ajakirja peatoimetaja on Venemaa Teaduste Akadeemia akadeemik, MEPhI professor, kõrgkooli teadusdirektor. N.G. Basova NRNU MEPhI O.N. Krokhin. Ajakirja põhirubriigid 1. Füüsika üldkursuse õpetamise kontseptuaalsed ja metoodilised küsimused gümnaasiumis, tehnikumis, kõrgkoolis. 2. Üldfüüsika kursuse õpetamise küsimused tehnikaülikoolides. 3. Kaasaegne füüsika laboritöökoda. 4. Näidisloengu eksperiment. 5. Infotehnoloogiad kehalises kasvatuses. 6. Füüsika üldkursuse õpetamise küsimused pedagoogikaülikoolides ja keskeriõppeasutustes. 7. Väikesemahulise füüsilise katse praegune praktika. 8. Füüsika üldkursuse sidumine teiste erialadega. 9. Kõrgkooli ja Venemaa Teaduste Akadeemia integreerimine.
Koordinaatide alguspunkt asetatakse hinge teljele, y-telg on suunatud allapoole, vedru vastupäeva pööramisel võetakse nurk positiivseks.
Eelvaade: Kehaline kasvatus ülikoolides nr 3 2016.pdf (3,2 Mb)22
Biomehaanika töövihik: [õppemeetod. toetus]
Õppe- ja metoodiline käsiraamat OPD.F.04 tsükli akadeemilise distsipliini "Biomehaanika" kohta. on mõeldud kehakultuurikõrgkoolides õppivatele üliõpilastele suunal 032100 "Kehakultuur" ja erialal "Tervisliku seisundiga puuetega inimeste kehakultuur (adaptiivne kehakultuur)". Õpik sisaldab nii teoreetilist materjali, laboratoorset töötuba kui ka kontrollküsimusi, mis on koostatud distsipliini "Biomehaanika" riikliku haridusstandardi nõudeid arvestades.
See koosneb kahest liigendvardast, mis on fikseeritud keha liigendlülidele (õlg - küünarvars, reie - sääreosa) ja hinge telg on joondatud liigese teljega (joonis 13, A). Seega kahe plangu moodustatud nurk...
Eelvaade: biomehaanika töövihiku õppejuhend.pdf (0,2 Mb)23
Puurmasinate ja mehhanismide uuringud. toetust
TPÜ kirjastus
Õpetus sisaldab seadme kirjeldust ja tööpõhimõtet, samuti spetsifikatsioonid kodumaise ja välismaise toodangu peamised puurimisseadmed uuringukaevude puurimiseks; määratakse selle optimaalne kasutusala. Käsiraamat on täiendus kursuse "Puurimismasinad ja mehhanismid" õpikule.
Mastisõrestik on ristkülikukujulise ristlõikega, terasnurkadest keevitatud ja portaalile kinnitatud, mis on ühest otsast kinnitatud rotaatori ääriku külge ja teisest otsast toetub pööratavalt hammaslatile. Hinge telg langeb kokku rotaatori pöörlemisteljega.
Eelvaade: puurmasinad ja mehhanismid.pdf (0,3 Mb)24
Nr 11 [Leiutaja ja uuendaja, 2012]
Ajakiri avaldab loomingulisi lahendusi tegelikele probleemidele. See on üks vanimaid väljaandeid. Enamus arendustest, millest ajakiri kirjutab, sobivad otsekasutuseks, on mudeleid, prototüüpe ja teised on juba läbinud väiketootmise etapi. Ajakirja igas numbris avaldatakse tavaliselt enam kui 100 erinevat tehnilist uuendust leiutiste tasemel.
Näiteks Toptygini hooratta konstruktsiooniprintsiibi (klapitava konsooli hingetelg läbib selle tuulekeskpunkti – nii sai ta tiival tõstehetkest üle) sain teada üsna hiljuti.
Eelvaade: Leiutaja ja uuendaja nr 11 2012.pdf (1,8 Mb)25
Mehaanika: õppejuhend
Ivanovo Riiklik Keemiatehnoloogia Ülikool
Kasutusjuhend sisaldab põhiteavet staatika, materjalide tugevuse ja edasise kohta erinevat tüüpi käigud, masinaosad, ülesanded ja kontrollküsimused.
2. Fikseeritud liigendtugi (joon. 1. 47, tugi B). Sellise toe reaktsioon B B R läbib liigendtelge ja sellel võib olla mis tahes suund joonise tasapinnas.
Eelvaade: mehaanikaõpetus.pdf (0,4 Mb)26
nr 3 [Paigaldus ja eritööd ehituses, 2005]
Ehituse erialaajakiri. Ajakirjas on käsitletud olulisemad montaaži- ja eriehitustööde valdkonnad; ehitusmaterjalid ja -tehnoloogiad; kergmetallkonstruktsioonide, uue põlvkonna kraanade, keevitusmaterjalide väljatöötamine ja juurutamine; energia ja ressursside säästmine; uued reguleerivad ja ametlikud dokumendid; ehitusvaldkonna õigustloovad aktid; nõustamine eeldatava hinnakujunduse osas ehitusel ja lepingute pakkumisel, väliskogemus.
5 - poolringikujuline tala; 6 - ankurelement; 7 - puff; 8 - hinge telg Ring jookseb mööda telgesid I-1, G-1 ja piki poolringikujulist tala joont on valmistatud terasest I-sektsioonist.
Eelvaade: Paigaldus ja eritööd ehituses nr 3 2005.pdf (4,2 Mb)27
Ratassõidukite dünaamika. 1. osa uuring. toetust
Ratassõidukit häirivate mõjude allikad, ratassõidukite dünaamiliste süsteemide inertsiaalsete, elastsete ja dissipatiivsete parameetrite määramise teoreetilised ja eksperimentaalsed meetodid, vabad ja sundvõnkumised mitmesuguste mittelineaarsete hõõrdetüüpidega süsteemides lineaarse ja mittelineaarse taastava jõuga, samuti vaadeldakse parameetrilisi võnkumisi dünaamilistes süsteemides.ratastega sõidukid ja hõõrdumise isevõnkumised.
tema punktid. Seega, kui pendli raskusele ei rakendata jõudu, kuid liigendtelg on horisontaalse liikuvusega ja sellele on antud võnkumised x = x(t), siis need põhjustavad pendli enda võnkumisi (joonis 8.1, b). . Diferentsiaali saamiseks...
Eelvaade: ratastega sõidukite dünaamika. Osa 1. Vulture UMO. .pdf (0,4 Mb)28
Nr 1 [Ülikoolide uudised. Tehnika, 2012]
M.: Kirjastus MSTU im. N.E. Bauman
Ajakiri tõstab esile kõrgkoolide ja teadusasutuste töötajate teoreetiliste ja eksperimentaalsete uuringute tulemusi masinate arvutamise ja projekteerimise, transpordi ja energeetika, inseneritehnoloogia, majanduse, ettevõtte organisatsiooni ja juhtimise, uute materjalide ja tehnoloogiate kohta. , teaduse ja tehnika ajalugu, kasvatus- ja metoodiline töö.
Kui aga liigendi telg 3-4 asetada piki lüli 4, on vabadusastmete arv sama, mis nõutud, kuid ahela kinemaatika muutub täiesti erinevaks, mis on vastuvõetamatu.
Eelvaade: MSTU bülletään im. N.E. Bauman. Kõrgkoolide uudised. Tehnika. №1 2012.pdf (0,1 Mb)29
Nr 8 [Modellidisainer, 2013]
Populaarne igakuine teadus- ja tehnikaajakiri. Ilmub alates augustist 1962 Moskvas. Tuntud lennukikonstruktorid A. Tupolev, S. Iljušin, kosmonaut Yu Gagarin andsid uuele väljaandele head lahkumissõnad. Sellest ajast peale on ajakiri juba üle neljakümne aasta käsitlenud teadus- ja tehnikaloomingu, amatöördisaini küsimusi ning jutustab kodu- ja välismaise tehnika ajaloost. Selle autorite hulgas on kuulsad leiutajad ja disainerid, meistrid tehnilised tüübid sport - suur armee mitmekülgseid käsitöölisi, tehnikahuvilisi, selle ajalugu. "Modeller-Designer" on ainus ajakiri riigis, mille igas numbris on joonised, skeemid ja kirjeldused improviseeritud kujundused. Toimetus näeb ühe peamise ülesandena aidata igal lugejal, olenemata vanusest, saada kõigi ametite tungrauaks, mitte ainult tehnikatundjaks, vaid ka mitmekülgseks käsitööliseks, kes suudab valmistada kõike tööks ja vaba aja veetmiseks vajalikku. oma kätega. TELLIMISE NUMBRIDE ÜLEKANDMINE TOIMUB 12-KUUSE HILINEMISEGA!!!
Terastoru 60x30); 9 – varuratta kinnitusseib (teras, plekk s6); 10 - hinge telg UAZ-469 uus kronstein, mis on keevitatud vana UAZ-69 raami külge 50 mm läbimõõduga Plaza amortisaatori jaoks. Raami torud on kaetud kunstnahaga.
Eelvaade: Model Designer nr 8 2013.pdf (0,1 Mb)30
Kaevandusmasinate paigaldus ja seadmete uuringud. toetust
Sib. föder. ülikool
Käsitletakse sõlmede kokkupaneku ning kaevandusmasinate ja -seadmete paigaldamise teoreetilisi ja praktilisi aluseid. Sellel on teave paigalduskoha paigutuse ja varustuse kohta, mehhaniseeritud ekskavaatorite osade, sõlmede ja mehhanismide, draglain-ekskavaatorite, pöörlevate ja kallurseadmete, tragide ja konveieriliinide asukoht, nende paigaldamise laiendatud võrgugraafikud ja töö ulatus on antud. Esitatakse teave vundamentide projekteerimise ja põhiparameetrite arvutamise kohta, näidatakse neile masinate ja seadmete paigaldamise funktsioone. Praktilises osas antakse teavet hammasrataste ja laagrisõlmede koostamise, pöörlevate toodete tasakaalustamise, samuti taglase ja nende rakendamise ohutusreeglite kohta.
Pöörlevate osade ja sõlmede tasakaalustamine Kõige täpsem ja samas keerukam staatiline tasakaalustusseade on tasakaalustuskaal (joon. 51). Pöördtihvt Rattalaba hingetugi Joon. 51.
Eelvaade: kaevandusmasinate ja -seadmete paigaldamise õpetus (sertifitseeritud UMO).pdf (1,5 Mb)31
Tüsistused ja õnnetused kaevude ekspluateerimisel ja remondil.
Koolitusjuhendis vaadeldi ja analüüsiti Lääne-Siberi nafta- ja gaasiväljadel puurkaevude käitamiseks ja remondiks kasutatavaid seadmeid ja tööriistu. Näidatud on seadmete peamised eelised ja puudused. Katsetööde põhjal on välja töötatud ja soovitatav kasutada uusi kaevude käitamise ja töötamise seadmeid ja tööriistu. Lühidalt käsitletakse nafta- ja gaasipuuraukude kasutamise meetodeid ning süsivesinike tooraine tootmisel tekkivaid tüsistusi. Analüüsitakse tüsistuste esinemise tingimusi ja olemust. Nafta- ja gaasipuuraukude ekspluatatsiooni ja remondi käigus tekkivate tüsistuste analüüsi põhjal on välja toodud tehnoloogiad ja tehnilised vahendid, mis võimaldavad parandada nafta- ja gaasipuuraukudes tehtavate remonditööde kvaliteeti. Käsitletakse tehnoloogiaid tootmisnööri ja tsemendikivi lekete likvideerimiseks, parafiini lademete ja vedeliku eemaldamiseks puurkaevu põhjast, gaasihüdraadi ja liiva-argillase korgi likvideerimiseks, kihistu vee sissevoolu isoleerimiseks. Pakutakse välja tehnoloogiad puurkaevude seadmete ja tööriistade purunemise ja põhjaauku kukkumisega seotud õnnetuste likvideerimiseks koos põhjaaugu puhastamisega võõrkehadest ning kinnikiilunud torude likvideerimisega.
käepideme naast; 15 - turvavarda telg; 16 - kaitse haakeseadise iseseisvaks lahtihaakimiseks ...... 27 - välimine hülss; 28 - sisemine varrukas; 29 - hinge telg Sadula külgmised kõrvad 6 on jäigalt ühendatud. telgedega 29 hinged 25, mis...
Eelvaade: autotööstuse erivarustus.pdf (0,9 Mb)35
Lennuki konstruktsioonimehaanika [elektrooniline...
SSAU kirjastus
Õpik on mõeldud erialade 160100.65 "Lennuki- ja helikopteritehnika", 160400.65 "Rakettide ning raketi- ja kosmosekomplekside projekteerimine, tootmine ja käitamine" kursuse "Lennuki ehitusmehaanika" traditsioonilisteks tundideks valmistumiseks ja iseõppimiseks, samuti 151600.62 "Rakendusmehaanika" . Kasutusjuhend sisaldab näiteid tüüpiliste probleemide lahendamisest. See võib olla kasulik mitte ainult lennukite ehitusmehaanika teoreetilist materjali uurides, vaid ka sooritades kursusetööd ja 3-6 kursuse üliõpilaste diplomitööd.
7. Fikseeritud liigendtugi (joon. 10, tugi B). Reaktsioon Joon. Sellise toe 10 RB läbib liigendtelge ja sellel võib olla mis tahes suund joonise tasapinnas.
Eelvaade: teoreetiline mehaanika. 2 osas. 1. osa e-õpe.pdf (20,0 Mb)37
Nr 11 [Modellidisainer, 2011]
Populaarne igakuine teadus- ja tehnikaajakiri. Ilmub alates augustist 1962 Moskvas. Tuntud lennukikonstruktorid A. Tupolev, S. Iljušin, kosmonaut Yu Gagarin andsid uuele väljaandele head lahkumissõnad. Sellest ajast peale on ajakiri juba üle neljakümne aasta käsitlenud teadus- ja tehnikaloomingu, amatöördisaini küsimusi ning jutustab kodu- ja välismaise tehnika ajaloost. Selle autorite, kuulsate leiutajate ja disainerite, tehnikaspordi meistrite hulgas on suur armee mitmekülgseid käsitöölisi, tehnika ja selle ajaloo austajaid. "Modeler-Designer" on ainus ajakiri riigis, mille igas numbris on trükitud joonised, diagrammid ja mitmesuguste kodus valmistatud konstruktsioonide kirjeldused. Toimetus näeb ühe peamise ülesandena aidata igal lugejal, olenemata vanusest, saada kõigi ametite tungrauaks, mitte ainult tehnikatundjaks, vaid ka mitmekülgseks käsitööliseks, kes suudab valmistada kõike tööks ja vaba aja veetmiseks vajalikku. oma kätega. TELLIMISE NUMBRIDE ÜLEKANDMINE TOIMUB 12-KUUSE HILINEMISEGA!!!
Jõud rakendatakse hingetsoonis D. Ja kui see jõud oleks ainuke, siis liigendi teljele ja talale mõjuv paindemoment võib konstruktsiooni hävitada. Kuid seda ei juhtu tagaratta abi tõttu ...
Eelvaade: Voroneži Riikliku Põllumajandusülikooli bülletään nr 1-2 2014.pdf (2,8 Mb)Kui näiteks elektrit hakati kasutama suhteliselt hiljuti, siis mehaanika saadab inimkonda tuhandeid aastaid. Iidsed teadmised selles vallas ei jää alla tänapäevastele teadmistele, kuigi loomulikult on tänapäeva tehnoloogiad paljuski muutunud. Kuid kinemaatika elementaarsed seadused, mis on kõigi mehaaniliste protsesside aluseks, on aktuaalsed ka tänapäeval. Samuti on asjakohased mehaaniliste elementide vahelised side- ja ülekandesõlmed. Üks neist sõlmedest on liigend.
Mis on liigend
Kinemaatilist paari nimetatakse hingeks, mille üks element sooritab pöörlevat liikumist, pöördudes teise elemendi suhtes. Lihtsaim ja enimkasutatav hing on uksehing. Mehaanikas kasutatava pöördratta eripäraks on sellega ühendatud konstruktsiooniosade võime teha nurkseid liikumisi. Hinged ei kanna paindemomenti konstruktsiooni osade vahel üle.Diagrammidel ja tehnilistel joonistel on pöördliigend kujutatud väikese läbimõõduga ringina. See ring võib ühendada kahte või enamat konstruktsioonielementi, mõnikord külgneda ainult ühega.
Kui tala kujutisele kantakse hingekujutis, tähendab see, et talal on hingedele kokku pandud liitstruktuur. Kui hing piirneb sellega ainult diagrammil, siis selline tala on kindel, sellega on ühendatud hing.

Liigendatud liigeste tüübid
Kui hingega on ühendatud mitte rohkem kui kaks elementi, nimetatakse sellist ühendust lihtsaks hingeks. Kompleksne liigend hõlmab kolme või enama elemendi koostoimet ühes sõlmes.Mis on fikseeritud liigend? Süsteem, kus varda saab pöörata ümber hinge telje, kuid hinge kinnituskoht ise jääb fikseerituks. Liigutatavad - need on ühendused, kus hingel pöörleb telg ja hinge kinnituspunkt saab liikuda mööda juhikut.
Kõik hinged on klassifitseeritud vastavalt võimalik viisühendatud osade nihkumine üksteise suhtes. Nemad on:
- Silindriline pööre. See liigendi konstruktsioon hõlmab mõlema lüli jaoks ühise telje suhtes nurkliikumise rakendamist. Kuuli pöörlemine. Võimalik nurkne liikumine ümber ühise punkti Kardaantüüp. Kompleksne liigendliigend, mis koosneb silindrilistest hingedest, mida ristavad teljed täisnurga all (rist). Need on järjestikku kombineeritud veo- ja veovõllide kahvlitega Võrdne nurkkiirus (CV liigend). Disain on keeruline tõukejõu edastamiseks ja samaaegselt pöörlevate liigutuste teostamiseks, säilitades samal ajal ajami ja veovõlli vahel sama pöördemomendi.

Jäik liigend
Jäigad liigendühendused on esindatud elastsete poolkardaanliigenditega. See on mehhanism, mille puhul pöördemoment juhtvõllist erineva asukohanurgaga vedavale võllile toimub neid ühendava lüli deformatsiooni teel. Elastne lüli on valmistatud kummist koos võimaliku tugevdusega.Sellise elastse elemendi näide on Guibo ühendus. See näeb välja nagu kuusnurkne element, millesse on vulkaniseeritud metallvooderdised. Varrukas on eelnevalt kokku surutud. Seda konstruktsiooni iseloomustab väändevõngete hea tasandamine, aga ka konstruktsioonilised löögid. Võimaldab kuni 8-kraadise kaldenurgaga võllide liigendamist ja telje liikumist kuni 12 mm mõlemas suunas. Sellise mehhanismi põhiülesanne on kompenseerida paigaldamise ajal tekkinud ebatäpsused.
Sõlme puudused hõlmavad suurenenud müra töös, tootmisraskused ja piiratud kasutusiga.

Vajadusel pöörlev
Pöördliigendit on praktikas võimalik kasutada vastavalt selle vabadusastmele. Keerulisel hingel võib sõlmes olla kuni kuus vabadusastet. Kolm kraadi on liikumiseks ja kolm pöörlemiseks. Mida rohkem vabadusastmeid, seda huvitavam on modelleerimisprotsessi liigend.Lihtne silindriline hing on levinud majapidamis- ja tööstustehnikas: igat tüüpi ukseühendused, torustiku elemendid (pöördsegistid), tööriistad nagu tangid, käärid, kõik, kus liiguvad lamedad osad jne.
Kerakujulist (kuulliigendit) kasutatakse autotööstuses veermikus, konsoolides Pult, masinaehituses ja robootikas.
Kardaan (konksliigend) pöörleva liikumise ülekandmisel mootorilt tagarattavedu sõidukist jõuvõtuvõllilt kuni manuseid spetsiaalsetes seadmetes, kus iganes ülekanne läheb nurga all asuvate võllide vahel.
Sisse on paigaldatud liigutatavad SHRUS-pöördliigendid esirattaveoga sõidukid.

Hingesõlme hooldus
Hinged on elemendid, mis on allutatud mehaanilisele pingele. Neile avaldavad hõõrdekoormused. Tänu sellele, et hingede moodsas disainis kasutatakse laagrisõlmesid, on hõõrdumine oluliselt vähenenud. Aga arenemisprotsessis määrdeaine kulumine suureneb. Seetõttu vajab pöördliigend pidevat määrimist.Keerulistes liigendites (autode CV-liigendid), kus kasutatakse avatud tüüpi laagrisõlmesid, on hävitavaks teguriks mustus ja tolm. Need toimivad abrasiivina ja põhjustavad metalli kiiret kulumist. Sellised süsteemid kasutavad kaitsekatted(tolmupead), mis kaitsevad kogu liigendit tervikuna. Selliste üksuste eest hoolitsemine seisneb tolmukate õigeaegses väljavahetamises, kuna kumm kipub lagunema, on vaja ka hingeliideseid määrida.

Pöördliigendite jaoks kasutatavad määrdeained
- Liitiumi baasil. Usaldusväärsed paksud määrded, millel on kõrged säilivusomadused. Vähendage sõlmeühenduste koormust kuni kümme korda. Neutraliseerib tolmu ja ühildub peaaegu kõigi vaigust saapamaterjalidega. Puuduseks on see, et neil on madal korrosioonivastane kaitse ja need hävitavad osa plastist.Põhineb molübdeendisulfiidil. Määrdeained pika kasutuseaga kuni sada tuhat läbisõitu. Suurepärane määrimis- ja korrosioonivastane jõudlus. Ei hävita plastikut. Puuduseks on see, et niiskuse sattumisel kaotab määrdeaine oma omadused.Baariumi baasil. Head määrdeained liitium- ja molübdeendisulfiidi eelistega. Samuti ei karda nad niiskust. Puuduseks on hävimine madalatel temperatuuridel ja kõrge hind.
Järeldus
Ärge unustage, et paljude erinevate liigendühenduste ja kinemaatilise ülekande meetoditega mehaaniliste struktuuride hulgas on peamine mehhanism endiselt inimese aparaat. Mis, muide, sisaldab 187 looduslikku liigendit, mida nimetatakse liigenditeks. Seetõttu laseb inimene tehnika eest õigeaegselt hoolt kandes ja selle eluiga pikendades sellel meie keha koormust leevendada – lõppude lõpuks, näete, pole seda millegagi asendada.SHRUS skeem:
ω1, ω2- vastavalt võllide 1 ja 2 nurkkiirused;
α, β
- hinge nurk;
KOHTA- võlli hoobade 1 ja 2 kokkupuutepunkt;
r1, r2- vastavalt võlli 1 ja võlli 2 hoobade pöörlemisraadiused;
OO" - nurgapoolitaja ϕ
Ka nelikveoliste ja esiveoliste sõidukite esiveorattad on juhitavad ehk peavad pöörlema, mis eeldab ratta ja teljevõlli vahelise liigendliigendi kasutamist. Ebavõrdse nurkkiirusega kardaanliigendid edastavad pöörlemist tsükliliselt ja töötavad võllide vahel väikeste nurkade all, mis muudab nende kasutamise antud juhul problemaatiliseks. Nendel tingimustel sünkroonsed kuulliigendid, nn püsikiirusega liigendid (SHRUS).
Esiveolises autos kasutatakse tavaliselt kahte sellist hinge sisemist (ühendatakse käigukastiga) ja kahte välist (kinnitatakse rataste külge). Nende hingede seadet saab kujutada järgmiselt: igas hinges on kaks põhiosa - korpus ja klamber, üks teise sees. Nendesse osadesse tehakse kuulidega sooned, mis tegelikult ühendavad jäigalt mõlemad sfäärilised osad, mille kaudu kandub pöörlemine mootorilt rattale. Samal ajal lasevad kuulid soontes liikudes ühel sfäärilisel osal teise suhtes pöörata ja samal ajal ratast pöörata. Kõigi erinevate konstruktsioonilahenduste puhul tuleb konstantse kiirusega liigendites järgida üht põhimõtet: kokkupuutepunktid, mille kaudu ringjoonelised jõud üle kanduvad, peavad asuma tasapinnal, mis läbib võllide vahelise nurga poolitaja (poolitajatasandil). .
Kahekordne kardaanliigend
Seda tingimust saab pakkuda mitmel viisil. Lihtsaim lahendus on ühendada kaks tavalist ebavõrdse nurkkiirusega universaalliigendit nii, et ühe ajami ike toimib teise ajami ikkena. Seda disaini nimetatakse kahekordne kardaanliigend.
Esimesed topelthingede kujundused 20ndatel. eelmise sajandi olid üsna mahukad, nad ei lahkunud rummu esiratas kohad pidurimehhanismile, mis tuli karterisse viia peamine käik. Kuid aja jooksul kahekordsed universaalliigendid paranesid, muutusid kompaktsemaks ja kestsid kaua autod kuni 60ndateni. Nõellaagrite topeltliigenditele on iseloomulik nende laagrite suurenenud kulumine ja ristnaelad, kuna auto valdavalt sirgjoonelise liikumise tõttu laagrinõelad ei rullu, mille tulemusena nende osade pinnad, millega need kokku puutuvad kontakti allutatakse soolveele ja nõelad ise on mõnikord lamedad.
Nukk universaalliigendid
Kardaani liigend"Trakt"
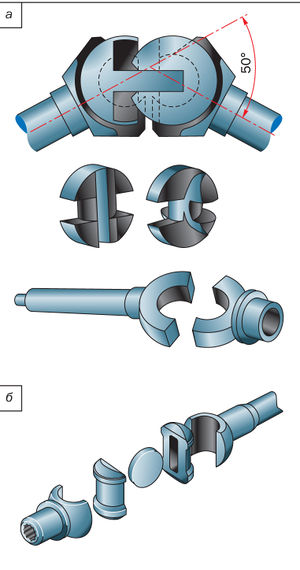
Nukk universaalliigendid:
a - "trakti" liigend,
b - ketas
1925. aastal esiveolistel autodel Hing "Trakt"(joonisel asend "a"), mis koosneb neljast stantsitud osast: kahest puksist ja kahest vormitud rusikast, mille hõõrdumispinnad lihvitakse. Kui nukk universaalliigend on jagatud piki sümmeetriatelge, siis on iga osa ebavõrdse nurkkiirusega kardaanliigend fikseeritud pöördetelgedega (sama, mis topeltkardaani puhul). Meie riik on arenenud nukk-ketta liigend, mida kasutatakse nelikveolistel veoautodel KrAZ, Ural, KamAZ.
Hing (joonisel asend "b") koosneb viiest lihtsa konfiguratsiooniga osast: kaks kahvlit, kaks rusikat ja ketas.
Interakteeruvate osade arenenud pindade olemasolu tõttu on nukkühendused võimelised edastama märkimisväärset pöördemomenti, tagades samal ajal võllide vahel kuni 45° nurga. Kuid libisev hõõrdumine kontaktpindade vahel toob kaasa asjaolu, et sellel hingel on kõigist võrdse nurkkiirusega hingedest madalaim efektiivsus. Selle tagajärjeks on hingede osade märkimisväärne kuumenemine ja hõõrdumine.
universaalliigend "Weiss"

Jaotussoontega hing "Weiss":
1, 5 - võllid;
2, 4 - rusikad;
3 - pallid;
6 - tsentreerimispall;
7, 8 - kinnitustihvtid
Topeltliidete ja nukk-tüüpi liigendite puudused olid tõukejõuks uute lahenduste otsimisel ning 1923. aastal patenteeris saksa leiutaja Karl Weiss kaldsoontega kuulliigendi ( kirjuta "Weiss").
Selle hinge eripäraks on see, et kui auto liigub edasi, edastatakse liikumist üks kuulipaar ja tagurpidi- teine paar. Jõude ülekandmine ainult kahe kuuliga punktkontaktis põhjustab suuri kontaktpingeid. Seetõttu paigaldatakse see tavaliselt sõidukitele, mille teljekoormus ei ületa 30 kN. Teise maailmasõja ajal paigaldati Bendixi toodetud sarnased hinged sellistele autodele nagu Willis, Studebaker, Dodge. Kodumaises praktikas kasutatakse neid UAZ, GAZ-66 sõidukitel.
"Weissi" tüüpi liigendid on tehnoloogiliselt arenenud ja odavad valmistada, võimaldavad teil saavutada võllide vahel kuni 32 ° nurga. Kuid suurte kontaktpingete tõttu ei ületa kasutusiga tavaliselt 30 tuhat km.
Kardaani liigend "Rceppa"

Kardaani liigend "Rceppa":
1 - poolitajatasand
2 - jaotushoob
1927. aastal ilmus eraldushoovaga kuulliigend ( liigend "Rceppa"). Ühendus on tehnoloogiliselt keerukas, kuid kompaktsem kui kaldsoontega liitmik ja võib töötada võllide vahelise nurga all kuni 40°. Kuna selle liigendi jõudu edastavad kõik kuus kuuli, tagab see väikeses suuruses suure pöördemomendi ülekande. Selle vastupidavus ulatub 100-200 tuhande km-ni.
Kardaani liigend "Birfield"

Kuue kuulliigend koos indekseerimissoontega
Selle lähenemisviisi edasine areng on kuue kuulliigendi tüüp "Birfield" jagavate soontega. Selline liigend võib töötada võllide vahelise nurga all kuni 45 °. Seda tüüpi hingedel on kõrge vastupidavus. Hinge enneaegse hävimise peamine põhjus on elastse kaitsekatte kahjustus. Sel põhjusel on maastikusõidukitel sageli terasest korgitihend. See aga viib hinge mõõtmete suurenemiseni ja piirab võllide vahelise nurga 40°-ni. Seda tüüpi hinged kasutatakse laialdaselt eesmiste juhitavate ja veorataste kardaanülekandes kaasaegsed autod. See on paigaldatud välimisse otsa kardaan; samal ajal on sisemisse otsa vaja paigaldada konstantse kiirusega liigend, mis on võimeline kompenseerima kardaani pikkuse muutust elastse vedrustuse elemendi deformeerumisel. Sellised funktsioonid on kombineeritud universaalses kuue kuuliga universaalliigendis (tüüp GKN).
Kardaanliigendi tüüp GKN
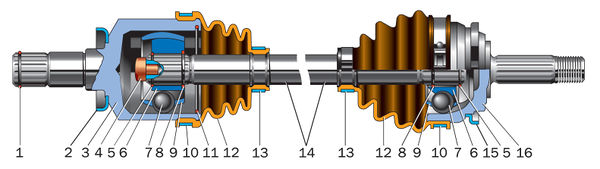
Universaalne kuue kuuliga universaalliigend GKN:
1 - sisemise hingekorpuse kinnitusrõngas;
2 - sisemise hinge kaitserõngas;
3 - sisemise hinge korpus;
4 - võlli peatus;
5 - kinnitusrõngas;
6 - klamber;
7 - pall;
8 - tõukejõu rõngas;
9 - eraldaja;
10 - välimine krae;
11 - sisemise hinge lukk;
12 - kaitsekate;
13 - sisemine klamber;
14 - ratta veovõll;
15 - välimise hinge kaitserõngas;
16 - välimise hinge korpus
Aksiaalse liikumise tagab kuulide liikumine mööda kere pikisuunalisi sooni, samas kui vajalik liikumishulk määrab tööpinna pikkuse, mis mõjutab hinge mõõtmeid. Selle konstruktsiooni maksimaalne lubatud võlli nurk on piiratud 20°-ga. Aksiaalsete liikumiste ajal pallid ei veere, vaid libisevad, mis vähendab hinge efektiivsust.
Loebro universaalliigend

Loebro universaalliigend:
1- Sooned soone nurgaga 15-16°
Loebro liigend erineb GKN-st selle poolest, et topsi ja sõrmenuki sooned on lõigatud silindri generatrixi suhtes 15-16° nurga all ning puuri geomeetria on õige - ilma koonusteta ning paralleelsete välis- ja sisekülgedega. See on väiksem kui teised kuue kuulliigendid, lisaks on selle eraldaja vähem koormatud, kuna see ei täida rusikate kuulide nihutamise funktsiooni.