इलेक्ट्रिक मोटर की शक्ति या शाफ्ट गति और अन्य मापदंडों का पता लगाने की आवश्यकता थी, लेकिन सावधानीपूर्वक निरीक्षण के बाद, इसके शरीर पर इसके नाम और तकनीकी मापदंडों के साथ कोई प्लेट (नेमप्लेट) नहीं थी। आपको इसे स्वयं निर्धारित करना होगा; ऐसा करने के कई तरीके हैं, और हम उन्हें नीचे देखेंगे।
विद्युत मोटर की शक्ति वह दर है जिस पर विद्युत ऊर्जा परिवर्तित होती है और आमतौर पर वाट में निर्धारित होती है।
यह कैसे काम करता है यह समझने के लिए, हमें 2 मात्राओं की आवश्यकता है: करंट और वोल्टेज। करंट स्ट्रेंथ करंट की वह मात्रा है जो एक निश्चित अवधि में एक क्रॉस सेक्शन से गुजरती है; यह आमतौर पर एम्पीयर में निर्धारित की जाती है। वोल्टेज एक सर्किट में दो बिंदुओं के बीच चार्ज को स्थानांतरित करने के लिए किए गए कार्य के बराबर मूल्य है; यह आमतौर पर वोल्ट में निर्धारित किया जाता है।
शक्ति की गणना करने के लिए, सूत्र N = A/t का उपयोग करें, जहां:
एन - शक्ति;
काम के बारे में क्या;
अक्सर इलेक्ट्रिक मोटर पहले से निर्दिष्ट तकनीकी मापदंडों के साथ कारखाने से आती है। लेकिन घोषित शक्ति हमेशा वास्तविक के अनुरूप नहीं होती है, और सबसे अधिक संभावना है कि इसका मतलब केवल विद्युत प्रवाह की अधिकतम शक्ति हो सकता है।
इसलिए यदि आपका बिजली उपकरण, उदाहरण के लिए, 500 वाट की शक्ति इंगित करता है, तो इसका मतलब यह बिल्कुल नहीं है कि उपकरण ठीक 500 वाट की खपत करेगा।
इलेक्ट्रिक मोटरें मानक पृथक शक्ति उत्पन्न करती हैं, जैसे 1.5, 2.2, 4 किलोवाट।
एक अनुभवी इलेक्ट्रीशियन केवल इसके आयामों को देखकर आसानी से 1.5 को 2.2 किलोवाट से अलग कर सकता है। इसके अलावा, वह स्टेटर आकार, पोल जोड़े की संख्या और शाफ्ट व्यास के आधार पर इंजन क्रांतियों की संख्या निर्धारित करने में सक्षम होगा।
रैपर इस मामले में और भी अधिक अनुभवी होगा; एक विशेषज्ञ जो इलेक्ट्रिक मोटरों को रिवाइंड करने में लगा हुआ है वह 100% निश्चितता के साथ निर्धारित करेगा तकनीकी निर्देशआपकी इलेक्ट्रिक मोटर.
यदि मोटर रेटिंग प्लेट खो जाती है, तो मोटर शक्ति की गणना करने के लिए, आपको रोटर वाइंडिंग पर करंट को मापने और इलेक्ट्रिक मोटर की बिजली खपत का पता लगाने के लिए मानक सूत्र का उपयोग करने की आवश्यकता है।
इंजन की शक्ति निर्धारित करने की बुनियादी विधियाँ
धारा द्वारा शक्ति का निर्धारण. ऐसा करने के लिए, हम मोटर को नेटवर्क से जोड़ते हैं और वोल्टेज को नियंत्रित करते हैं। फिर, एक-एक करके, हम प्रत्येक स्टेटर वाइंडिंग के सर्किट में एक एमीटर जोड़ते हैं और खपत की गई धारा को मापते हैं। उपभोग की गई धाराओं का योग ज्ञात करने के बाद, परिणामी संख्या को एक निश्चित वोल्टेज से गुणा किया जाना चाहिए, परिणामस्वरूप हमें एक संख्या मिलती है जो वाट में विद्युत मोटर की शक्ति निर्धारित करती है।
आकार के आधार पर शक्ति का निर्धारण. आपको कोर का व्यास (अंदर से) और उसकी लंबाई मापने की आवश्यकता है।
हम शाफ्ट की समकालिक गति को कोर के व्यास (सेंटीमीटर में) से गुणा करते हैं, परिणामी आंकड़े को 3.14 से गुणा करते हैं, फिर इसे नेटवर्क आवृत्ति को 120 से गुणा करके विभाजित करते हैं। परिणामी शक्ति मान किलोवाट में है।

मीटर द्वारा माप. विधि सबसे सरल मानी जाती है। ऐसा करने के लिए, प्रयोग की शुद्धता के लिए, हम घर के सभी भार बंद कर देते हैं। इसके बाद, आपको एक निश्चित समय (उदाहरण के लिए, 10 मिनट) के लिए इंजन चालू करना होगा। ब्रश पर, आप किलोवाट में अंतर देख सकते हैं; इससे आप आसानी से गणना कर सकते हैं कि इंजन कितने किलोवाट की खपत करता है। सबसे सुविधाजनक तरीका पोर्टेबल विद्युत मीटर का उपयोग करना है जो वास्तविक समय में किलोवाट (वाट) में खपत दिखाता है।

इंजन द्वारा उत्पादित शक्ति का वास्तविक संकेतक निर्धारित करने के लिए, शाफ्ट रोटेशन गति, प्रति सेकंड क्रांतियों की संख्या और इंजन ट्रैक्टिव प्रयास में मापा जाना आवश्यक है।
घूर्णी गति को क्रमिक रूप से 6.28 से गुणा किया जाता है, जो बल और शाफ्ट की त्रिज्या का एक संकेतक है, जिसकी गणना कैलीपर का उपयोग करके की जा सकती है। पाया गया शक्ति मान वाट में व्यक्त किया गया है।
शाफ्ट व्यास द्वारा विद्युत मोटर शक्ति का निर्धारण। इलेक्ट्रिक मोटरों के उपयोग ने न केवल उद्योग में, बल्कि रोजमर्रा की जिंदगी में भी अपना अनुप्रयोग पाया है। एक इलेक्ट्रिक मोटर के कई पैरामीटर होते हैं, जिनमें से कुछ महत्वपूर्ण हैं पावर और बिजलीमोटर कनेक्ट करते समय. ये पैरामीटर आपको मोटर को बिजली देने के लिए आवश्यक वायरिंग के व्यास के साथ-साथ स्वचालित और रिले सुरक्षा का सही ढंग से चयन करने की अनुमति देते हैं। हम अभी यह पता लगाएंगे कि इलेक्ट्रिक मोटर की शक्ति का सही ढंग से निर्धारण कैसे किया जाए, साथ ही करंट का पता कैसे लगाया जाए।
इंजन की शक्ति, साथ ही इसके वर्तमान को समझने के लिए, इसके पासपोर्ट को देखना पर्याप्त है, जो सभी को इंगित करता है विशेष विवरण, या रिलीज के समय निर्माता द्वारा इलेक्ट्रिक मोटर पर चिपकाई गई एक विशेष सूचना प्लेट पर। इसके अलावा, यह विद्युत नेटवर्क से उपभोग की गई इंजन की सक्रिय शक्ति को इंगित करता है।
सभी बिजली खपत में सक्रिय शक्ति और प्रतिक्रियाशील इलेक्ट्रिक मोटर की शक्ति दोनों शामिल हैं। उदाहरण के लिए, घरेलू विद्युत मीटर का उपयोग करके आप खपत की गई सक्रिय विद्युत ऊर्जा की गणना कर सकते हैं। और औद्योगिक उद्यमों में विद्युत मोटरों का संचालन करते समय, प्रतिक्रियाशील ऊर्जा पर नियंत्रण रखा जाता है।
घर पर, हम इलेक्ट्रिक मोटर की शक्ति निर्धारित करते हैं
यह काम बिजली मीटर के जरिये किया जा सकता है. माप शुरू करने से पहले, आपको नेटवर्क से सभी विद्युत उपकरणों को बंद करना होगा, जिसमें प्रकाश व्यवस्था, साथ ही विद्युत पैनल से जुड़े उपकरण शामिल हैं, अर्थात। सभी उपभोक्ताओं की बिजली बंद होनी चाहिए।
इलेक्ट्रिक मोटर चालू करें और इसे पांच मिनट तक लोड के तहत चलने दें। आगे की माप बिजली मीटर के मॉडल पर निर्भर करती है:
यदि बिजली मीटर इलेक्ट्रॉनिक है, तो लोड किलोवाट में निर्धारित किया जाएगा, जो वर्तमान में उससे जुड़ा है;
यदि मीटर एक डिस्क इंडक्शन मॉडल है, तो इसे किलोवाट/घंटा में मीटर किया जाता है, और बिजली मापने के लिए, आपको अंतिम उपलब्ध मीटर रीडिंग रिकॉर्ड करनी चाहिए और इंजन चालू करना चाहिए
इसके लिए दस मिनट तक काम करना होगा. इसे बंद करने के बाद, आपको रीडिंग में अंतर ढूंढना होगा और परिणाम को छह से गुणा करना होगा, परिणामी मान इलेक्ट्रिक मोटर की सक्रिय शक्ति को व्यक्त करता है।
विद्युत मोटर की विद्युत धारा खपत निर्धारित करने के लिए आपको यह करना होगा:
एकल-चरण विद्युत नेटवर्क में, आपको बस गणितीय गणना करने की आवश्यकता है: विद्युत मोटर की उपलब्ध शक्ति को ज्ञात वोल्टेज मान से विभाजित करें;
तीन-चरण मोटरों में, आपको बस किलोवाट में ज्ञात शक्ति को दो से गुणा करना होगा।
किसी को सक्षम करना विद्युत मोटरएक प्रारंभिक धारा की घटना के साथ होता है, जिसका परिमाण विद्युत मोटर के मॉडल, घूर्णी गति और अन्य संकेतकों पर निर्भर करता है। आरंभिक विद्युत धारा रोटर को ऊपर की ओर धकेलने के लिए उत्पन्न होती है।
स्पिन-अप के क्षण में, आगमनात्मक प्रतिक्रिया प्रकट होती है, जिससे वर्तमान मूल्य में कमी आती है। ऊर्जा वृद्धि अन्य विद्युत उपकरणों के संचालन को प्रभावित करती है जो एक ही लाइन से संचालित होते हैं और इलेक्ट्रॉनिक्स की खराबी में योगदान कर सकते हैं। विशेष उपकरणों का उपयोग करके इनरश करंट को कम किया जाता है। इस प्रकार, विद्युत मोटर की शक्ति निर्धारित की जाती है और उसकी धारा ज्ञात की जाती है।
इसके अलावा, इलेक्ट्रिक मोटर शुरू करते समय विशेष उपकरणों का उपयोग उनके लंबे संचालन में योगदान देता है।
बहुत बार ऐसी स्थितियाँ उत्पन्न होती हैं जब 20-30 साल पहले निर्मित मौजूदा उत्पादन उपकरणों पर इलेक्ट्रिक मोटरें खराब हो जाती हैं और उन्हें बदलने के लिए एक एनालॉग का चयन करना पड़ता है। विफलता के कई विकल्प हैं: यह इलेक्ट्रिक मोटर के लंबे समय तक ओवरलोड के दौरान हीटिंग के परिणामस्वरूप वाइंडिंग की विफलता हो सकती है, साथ ही वाइंडिंग तार इन्सुलेशन की प्राकृतिक उम्र बढ़ने के कारण भी हो सकती है; शाफ्ट अंत का यांत्रिक घिसाव; अचानक आघात भार या अत्यधिक रेडियल भार के परिणामस्वरूप शाफ्ट की पूर्ण विफलता; फ्रेम के पैरों का टूटना; फ्रेम पर अक्षीय पंखे के ब्लेड या पंखों का टूटना जो गर्मी हस्तांतरण में सुधार करता है।
चूंकि उत्पादन उपकरण के मुख्य ड्राइव तंत्र तीन-चरण अतुल्यकालिक मोटर्स हैं, हम बिल्कुल उस मामले का विश्लेषण करेंगे जिसमें एक अतुल्यकालिक इलेक्ट्रिक मोटर के लिए एक एनालॉग का चयन करना आवश्यक है जो विफल हो गया है।
आइए निम्नलिखित स्थिति की कल्पना करें। परिसंचारी पानी को निकालने के लिए टैंक से पानी पंप करने के लिए तीन पंपों का एक समूह काम कर रहा है। पानी का उपयोग तकनीकी उपकरणों के शीतलन चक्र में किया जाता है, जिसके डाउनटाइम की अनुमति नहीं है। सभी पंप AO2 श्रृंखला के घरेलू स्तर पर उत्पादित इलेक्ट्रिक मोटरों से सुसज्जित हैं। इलेक्ट्रिक मोटरों की यह श्रृंखला पिछली शताब्दी के उत्तरार्ध में विकसित की गई थी और लंबे समय से बंद है।
पंपों का संचालन मोड इस प्रकार है। एक पंप को लगातार चालू रखा जाता है, दूसरे को थोड़े समय के लिए चालू किया जाता है यदि पहला उसे सौंपे गए कार्य का सामना नहीं कर पाता है और टैंक में पानी का ओवरफ्लो हो जाता है। तीसरा पंप रिजर्व है।
सबसे पहले, हम आपका ध्यान इस तथ्य की ओर आकर्षित करते हैं कि इस कंपनी द्वारा उत्पादित इलेक्ट्रिक मोटरें दो मानकों के अनुसार निर्मित की जाती हैं: DIN और GOST। DIN (डॉयचेस इंस्टीट्यूट फर नॉर्मुंग) एक जर्मन राष्ट्रीय मानक है जिसका उपयोग लगभग पूरे यूरोप में किया जाता है। GOST पूर्व यूएसएसआर का एक राज्य मानक है, और अब रूस और सीआईएस देशों का एक अंतरराज्यीय मानक है। हम दोनों मानकों की इलेक्ट्रिक मोटरों को देखते हैं।
समग्र और कनेक्टिंग आयामों को देखकर शुरुआत करना बेहतर है। पृष्ठ 44 पर हमें डीआईएन के अनुसार इलेक्ट्रिक मोटरों के आयामों वाली एक तालिका मिलती है डिज़ाइनआईएम1001.
सबसे पहले, हम शाफ्ट के अंत के आयामों, यानी उसके व्यास और लंबाई में रुचि रखते हैं। अर्थ ढूंढ रहे हैं डी 1 = 60 मिमी और एल 1 = 140 मिमी, खंभों की संख्या के लिए - 4। हम शाफ्ट रोटेशन अक्ष की ऊंचाई के साथ इन मूल्यों (चित्रा 2) के अनुरूप इलेक्ट्रिक मोटर आरए225एस और आरए225एम के प्रकार पाते हैं। एच= 225 मिमी.
घूर्णन अक्ष की ऊँचाई, बिल्कुल समान शक्ति पर आधुनिक विद्युत मोटरें, पहले उत्पादित की तुलना में कम। यह निर्माताओं द्वारा तकनीकी दृष्टि से बेहतर विद्युत सामग्री के उपयोग के कारण है। इसलिए, वे अधिक कॉम्पैक्ट और हल्के हो जाते हैं।
आइए इलेक्ट्रिक मोटर के प्रकार के पदनाम को समझें, उदाहरण के लिए - RA225S4У3:
- आरए - इलेक्ट्रिक मोटरों की श्रृंखला। इस श्रृंखला में 15 मानक आकार हैं;
- 225 - शाफ्ट रोटेशन अक्ष की ऊंचाई;
- एस - फ्रेम की लंबाई के साथ स्थापना आयाम (स्टेटर की सशर्त लंबाई);
- 4 - ध्रुवों की संख्या;
- यू - जलवायु संस्करण;
- 3 - आवास श्रेणी।
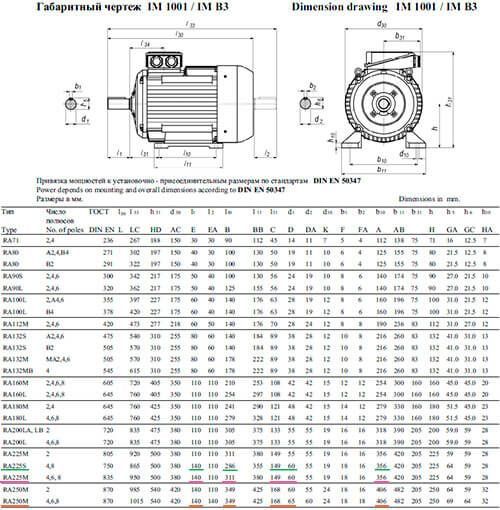
चित्र 2. आरए श्रृंखला मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 44
दोनों इलेक्ट्रिक मोटरों का शाफ्ट ऑफसेट है एल 31 = 149 मिमी; फ्रेम की चौड़ाई के साथ बढ़ते छेद के बीच की दूरी - बी 10 = 356 मिमी. RA225S इलेक्ट्रिक मोटर के लिए फ्रेम की लंबाई के साथ बढ़ते छेद के बीच की दूरी - एल 10 = 286 मिमी; इलेक्ट्रिक मोटर RA225M के लिए - एल 10 = 311 मिमी. सभी आयामों में से, केवल एक ही मेल खाता है, यह RA225M इलेक्ट्रिक मोटर के बढ़ते छेद के बीच फ्रेम की लंबाई के साथ की दूरी है - एल 10 = 311 मिमी. लेकिन यह कोई महत्वपूर्ण तर्क नहीं है, क्योंकि किसी भी मामले में, स्थापना के दौरान, आपको शाफ्ट के अंत के छोटे ओवरहैंग के कारण, बिस्तर में नए छेद ड्रिल करने होंगे।
आइए निम्नलिखित आकार RA250M की इलेक्ट्रिक मोटर के आयामों की जाँच करें (चित्र 2):
- घूर्णन अक्ष की ऊँचाई - एच= 250 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 65 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
बी 10 = 406 मिमी;
एल 10 = 349 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 168 मिमी.
निष्कर्ष। RA225S और RA225M इलेक्ट्रिक मोटर को स्थापित और समायोजित करने के लिए, आपको शीट मेटल से एक ट्रांज़िशन बेड बनाना होगा। RA250M इलेक्ट्रिक मोटर को स्थापित करने के लिए, आपको 65 मिमी शाफ्ट व्यास के लिए एक छेद और इस छेद के लिए एक की-वे की आवश्यकता होगी। दोनों ही मामलों में, मौजूदा बिस्तर में नए बढ़ते छेदों को चिह्नित करना और ड्रिल करना आवश्यक है।
आइए GOST के अनुसार इलेक्ट्रिक मोटरों के आयामों के साथ पृष्ठ 45-46 पर जाएँ।
उसी तरह, हम सबसे उपयुक्त प्रकार की इलेक्ट्रिक मोटरें ढूंढते हैं और तुलना के लिए उन आयामों को लिखते हैं जिनमें हमारी रुचि होती है।
A200L इलेक्ट्रिक मोटर (चित्र 3) के निम्नलिखित आयाम हैं:
- घूर्णन अक्ष की ऊँचाई - एच= 200 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 60 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 318 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 305 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 133 मिमी.
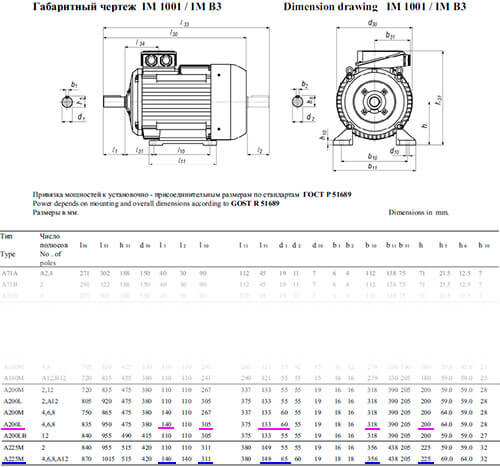
चित्र 3. श्रृंखला ए मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 45
इलेक्ट्रिक मोटर A225M (चित्र 3):
- घूर्णन अक्ष की ऊँचाई - एच= 225 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 65 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 356 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 311 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 149 मिमी.
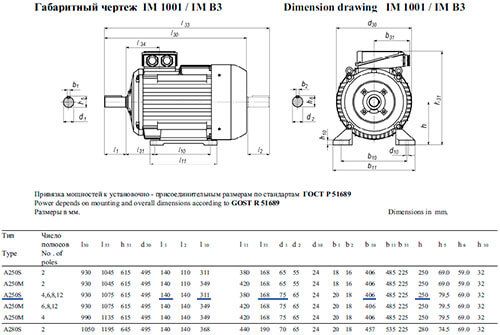
चित्र 4. श्रृंखला ए मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 46
इलेक्ट्रिक मोटर A250S (चित्र 4):
- घूर्णन अक्ष की ऊँचाई - एच= 250 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 75 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 406 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 311 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 168 मिमी.
तुलना में आसानी के लिए, हम प्राप्त परिणामों को एक तालिका में सारांशित करते हैं।
| मोटर प्रकार | शाफ्ट रोटेशन अक्ष की ऊंचाई, मिमी | शाफ्ट अंत व्यास, मिमी | शाफ्ट अंत की लंबाई, मिमी | शाफ्ट अंत ओवरहांग, मिमी | बढ़ते छेदों के बीच फ्रेम की चौड़ाई में दूरी, मिमी | बढ़ते छेदों के बीच फ्रेम की लंबाई के साथ दूरी, मिमी |
प्राप्त परिणामों की तुलना करते हुए, किसी विशेष इंजन के उपयोग के बारे में तुरंत एक विशिष्ट निष्कर्ष निकालना असंभव है, क्योंकि सब कुछ इसकी स्थापना की संभावना पर निर्भर करता है। ध्यान में रखने की जरूरत है बाहरी आयामजिस स्थान पर इसे स्थापित किया जाएगा, यह वहां फिट होगा या नहीं। क्या मौजूदा बिस्तर में नए बढ़ते छेद ड्रिल करना संभव है? क्या इसके आगे उपयोग के लिए मौजूदा आधे-युग्मन में छेद करना संभव होगा या एक नया बनाना आवश्यक होगा, इत्यादि।
यदि नया बिस्तर बनाना संभव है, तो कम शाफ्ट रोटेशन अक्ष ऊंचाई वाली मोटर का उपयोग करना बेहतर होता है, क्योंकि समान रोटेशन ऊंचाई वाली इलेक्ट्रिक मोटर स्थापित करते समय, आपको अतिरिक्त बिजली के लिए अधिक भुगतान करना पड़ता है। उदाहरण के लिए, 45 किलोवाट की शक्ति वाली A200L4 इलेक्ट्रिक मोटर की लागत 75 किलोवाट की शक्ति वाली A250S4 इलेक्ट्रिक मोटर की लागत से 1.5 गुना कम है।
इस मामले में, हम मान लेंगे कि इंजन स्थापित करने में हमें कोई बाधा नहीं है। तब RA225M4 इलेक्ट्रिक मोटर प्रतिस्थापन के लिए सबसे उपयुक्त होगी। आइए इसकी ऊर्जा विशेषताओं पर नजर डालें। ऐसा करने के लिए, आइए पृष्ठ 16 पर जाएँ। हम इस प्रकार की इलेक्ट्रिक मोटर वाली लाइन ढूंढते हैं और देखते हैं:
- इंजन प्रकार - RA225M4;
- नाममात्र रोटेशन, एन - 1465 आरपीएम;
- मूल्यांकित शक्ति, पीनाममात्र - 45 किलोवाट;
- दक्षता कारक, η - 92.5%;
- पावर फैक्टर, क्योंकि φ
- 0,87
- वोल्टेज 380 वी पर रेटेड वर्तमान, मैंनामांकन - 86 ए.
इन नंबरों से चिंतित न हों, क्योंकि तालिका इंजन की शक्ति को दर्शाती है, यानी 100% लोड पर। और चूँकि हमारा भरा हुआ है नया इंजनपर होगा -
![]()
तो नाममात्र मोड में खपत की गई धारा होगी:
आपको अपने मोटर सुरक्षा उपकरणों को पुन: कॉन्फ़िगर करने की भी आवश्यकता नहीं होगी।
विषय में जलवायु संस्करणऔर प्लेसमेंट श्रेणियां, तो उन्हें बिल्कुल विफल इंजन (U3) के समान ही लिया जाना चाहिए। तब इलेक्ट्रिक मोटर का प्रकार इस तरह दिखेगा: RA225M4У3.
लेख के लेखक:एवगेनी ज़िवोग्लायडोव।
सभी विद्युत मोटरों के आवास पर एक प्लेट लगी होती है जो उनका संकेत देती है विद्युत विशेषताओं. हम इस लेख में इलेक्ट्रिक मोटर के मुख्य मापदंडों के बारे में बात करेंगे।
इलेक्ट्रिक मोटर पैरामीटर: तालिका
| मापदण्ड नाम |
इकाई |
टिप्पणी |
| प्रकार | ||
| मूल्यांकित शक्ति | किलोवाट्ट | |
| वर्तमान मूल्यांकित | एम्पेयर | तीन-चरण इलेक्ट्रिक मोटरों के लिए वाइंडिंग कनेक्शन के प्रकार पर निर्भर करता है |
| रेटेड वोल्टेज | वाल्ट | |
| शक्ति कारक (दक्षता) | ||
| दक्षता कारक (cos ϕ) | % | |
| रेटेड रोटेशन गति | क्रांतियों प्रति मिनट |
लेकिन कभी-कभी संकेत गायब होता है या उसे पढ़ना असंभव होता है। ऑपरेशन के दौरान, इंजन को कई बार पेंट किया जाता है, अक्सर नेमप्लेट के साथ। इसलिए, माप द्वारा इसके मापदंडों को निर्धारित करना आवश्यक है।
इलेक्ट्रिक मोटर पैरामीटर नंबर 1: पावर
रेटिंग डेटा शाफ्ट पर रेटेड लोड पर नेटवर्क से खपत की गई रेटेड सक्रिय बिजली को इंगित करता है। माप करने के लिए, आपको इलेक्ट्रिक मोटर को लोड करना होगा, इसे एक मानक लोड के साथ परीक्षण करना होगा (डिवाइस के हिस्से के रूप में इसे चलाने का इरादा है)।
माप के लिए आप विद्युत मीटर का उपयोग कर सकते हैं। ऐसा करने के लिए, आपको स्टॉपवॉच द्वारा रिकॉर्ड किए गए समय के लिए मीटर पर एकमात्र लोड के रूप में इलेक्ट्रिक मोटर को कनेक्ट करना होगा।
गणना की सुविधा के लिए, इंजन को 10 मिनट के समय के लिए जोड़ा जाता है। कनेक्शन से पहले और 10 मिनट बाद मीटर से रीडिंग ली जाती है। kWh में रीडिंग का अंतर, 60/10 = 6 से विभाजित, किलोवाट में विद्युत मोटर की शक्ति के बराबर होगा।
कुछ इलेक्ट्रॉनिक मीटरों में तात्कालिक शक्ति मापने का कार्य होता है, जो कार्य को सरल बनाता है। इंजन चलने के साथ, आपको मीटर माप मेनू पर जाना होगा और उसमें वांछित मान ढूंढना होगा।
इलेक्ट्रिक मोटर पैरामीटर नंबर 2: वर्तमान खपत
विद्युत मोटर द्वारा खपत की गई धारा को मापने के लिए, वर्तमान दबाना, किसी परिपथ को बिना तोड़े उसमें धारा को मापना।

का उपयोग करते हुए मल्टीमीटर() या एम्मिटरआपको पहले से यह सुनिश्चित करना होगा कि मापे गए पैरामीटर का अपेक्षित मान माप सीमा के भीतर है। डिवाइस श्रृंखला में एक इलेक्ट्रिक मोटर के साथ या तीन चरणों की वाइंडिंग में से एक के साथ जुड़ा हुआ है। और आरंभिक धारा के बारे में मत भूलना, शुरू करने से पहले डिवाइस को सुरक्षित रूप से होना चाहिए शार्ट सर्किटताकि वह जले नहीं.
आप भी उपयोग कर सकते हैं इलेक्ट्रॉनिक काउंटरवर्तमान माप फ़ंक्शन के साथ।
यदि बिजली की खपत पहले से ही ज्ञात है, तो करंट की गणना की जा सकती है। एकल चरण मोटर के लिए:

तीन चरण के लिए:

यदि बिना भार के माप किया जाए तो परिणाम प्राप्त होता है अभी कोई बोझ नहीं. रेटेड करंट की गणना करना संभव नहीं है, क्योंकि नो-लोड करंट मानकीकृत नहीं है और रेटेड करंट का 20-40% है। इस मामले में, तीन-चरण अतुल्यकालिक इलेक्ट्रिक मोटर्स की नो-लोड धाराओं की गणना करने के लिए तालिका डेटा का उपयोग किया जाता है।
| इंजन की शक्ति, किलोवाट | नो-लोड करंट (रेटेड का प्रतिशत) | |||||
| घूर्णन गति पर, आरपीएम | ||||||
| 3000 | 1500 | 1000 | 750 | 600 | 500 | |
| 0,12-0,55 | 60 | 75 | 85 | 90 | 95 | |
| 0,75-1,5 | 50 | 70 | 75 | 80 | 85 | 90 |
| 1,5-5,5 | 45 | 65 | 70 | 75 | 80 | 85 |
| 5,5-11 | 40 | 60 | 65 | 70 | 75 | 80 |
| 15-22,5 | 30 | 55 | 60 | 65 | 70 | 75 |
| 22,5-55 | 20 | 50 | 55 | 60 | 65 | 70 |
| 55-110 | 20 | 40 | 45 | 50 | 55 | 60 |
इलेक्ट्रिक मोटर पैरामीटर नंबर 3: वाइंडिंग कनेक्शन का प्रकार
यह तीन-चरण इलेक्ट्रिक मोटर का एक बहुत ही महत्वपूर्ण पैरामीटर है। वाइंडिंग्स की शुरुआत और अंत के सभी छह टर्मिनलों को इंजन बार में लाया जाता है। इन्हें किसी तारे या त्रिकोण में जोड़ा जा सकता है।

प्रतीकों के आगे त्रिकोण/ताराप्लेट रेटेड वोल्टेज को इंगित करती है - "220/380 वी". इसका मतलब यह है कि जब नेटवर्क से कनेक्ट किया जाता है तीन चरण वर्तमान 380 V के वोल्टेज के साथ, मोटर वाइंडिंग को एक स्टार में जोड़ा जाना चाहिए। कनेक्शन में त्रुटि के परिणामस्वरूप मोटर ख़राब हो जाएगी।
रेटेड करंट को अंश के रूप में भी दर्शाया गया है। वर्णित मामले में, हर में निर्दिष्ट मान आवश्यक है।
मोटर स्टार्टिंग करंट
प्रारंभ के समय, विद्युत मोटर शाफ्ट गतिहीन होता है। इसे खोलने के लिए, आपको नाममात्र से अधिक बल की आवश्यकता होती है। इसलिए, प्रारंभिक धारा रेटेड धारा से अधिक है। जैसे ही शाफ्ट खुलता है, धारा धीरे-धीरे कम हो जाती है।
तीव्र धाराएँ विद्युत उपकरणों के संचालन में बाधा डालती हैं, जिससे अचानक वोल्टेज कम हो जाता है। शक्तिशाली इकाइयाँ शुरू करते समय, अन्य इलेक्ट्रिक मोटरों के स्टार्टर भी गायब हो सकते हैं और डीआरएल लैंप बुझ सकते हैं।
इलेक्ट्रिक मोटर का उपयोग आज विभिन्न तकनीकी साधनों और उपकरणों में किया जाता है, इसलिए कई उपयोगकर्ता रुचि रखते हैं कि इलेक्ट्रिक मोटर की शक्ति और वर्तमान का निर्धारण कैसे किया जाए? इंजन निर्माता अपने उत्पादों को डिवाइस हाउसिंग पर स्थापित विशेष तालिकाओं से लैस करते हैं। इन प्लेटों में डिवाइस की तकनीकी विशेषताओं के बारे में व्यापक जानकारी होती है: ब्रांड, रेटेड ऑपरेटिंग करंट, पावर, गति, दक्षता, मोटर प्रकार, आदि। यह सारा डेटा इलेक्ट्रिक मोटरों के तकनीकी दस्तावेज़ में भी शामिल है।
मोटर्स की सभी विशेषताओं में से, वर्तमान और बिजली की खपत उपयोगकर्ताओं के लिए सबसे महत्वपूर्ण है। यह डेटा आपको उपकरण को जोड़ने के लिए उपयोग किए जाने वाले विद्युत केबलों के क्रॉस-सेक्शन और वहन क्षमता को निर्धारित करने और उपयुक्त सुरक्षा उपकरणों - आरसीडी और स्वचालित सर्किट ब्रेकर का चयन करने की अनुमति देता है।
इस तथ्य के बावजूद कि ज्यादातर मामलों में इंजनों की तकनीकी विशेषताओं को खोजने में कोई समस्या नहीं होती है, कभी-कभी उपकरणों पर तकनीकी दस्तावेज और प्लेटें गायब होती हैं। ऐसी समस्याएं उपयोगकर्ताओं को विद्युत मोटर की शक्ति, वर्तमान और अन्य मापदंडों को निर्धारित करने के लिए अन्य विकल्पों की तलाश करने के लिए मजबूर करती हैं।
विद्युत मोटर शक्ति निर्धारित करने की विधि
ऐसे विभिन्न गणना सूत्र हैं जो आपको इलेक्ट्रिक मोटर की सटीक शक्ति निर्धारित करने की अनुमति देते हैं। कुछ सूत्रों का उपयोग करने के लिए, उपयोगकर्ता को मोटर स्टेटर के आयामों को मापना होगा; अन्य सूत्रों के लिए, उपयोगकर्ता को मोटर के वर्तमान मूल्य या दक्षता को जानना होगा। कई विशेषज्ञ व्यवहार में इन सूत्रों का उपयोग करते हैं, लेकिन इंजन की शक्ति निर्धारित करने के लिए एक बहुत सरल, अधिक सुविधाजनक तरीका भी है - व्यावहारिक माप। का उपयोग करके स्थापित मीटरघरेलू विद्युत नेटवर्क में विद्युत ऊर्जा की खपत से आप किसी भी उपकरण की शक्ति का पता लगा सकते हैं।
इस तरह के माप करने के लिए, सभी घरेलू विद्युत उपकरणों को बिजली की आपूर्ति से डिस्कनेक्ट करना आवश्यक होगा ताकि एक भी उपकरण विद्युत ऊर्जा की खपत न करे और मीटर न घूमे। प्रकाश व्यवस्था भी बंद कर देनी चाहिए, क्योंकि एक भी प्रकाश बल्ब जलाने से परीक्षण को नुकसान पहुँच सकता है।
बिजली निर्धारित करने की विशेषताएं इस बात पर निर्भर करती हैं कि आपने किस प्रकार का बिजली खपत मीटर लगाया है। यदि सुविधा में बिजली इनपुट पर एक पारा मीटर स्थापित किया गया है, तो यह केवल 3-5 मिनट के लिए पूरी शक्ति पर इलेक्ट्रिक मोटर को चालू करने के लिए पर्याप्त है। जब इंजन चल रहा हो, तो मीटर किलोवाट में मापा गया लोड मान दिखाएगा।

इस तरह के माप एक मानक इंडक्शन खपत मीटर का उपयोग करके किए जा सकते हैं, लेकिन आपको यह याद रखना होगा कि ऐसे उपकरण किलोवाट/घंटा में रिकॉर्ड रखते हैं। तो, सबसे पहले आपको अध्ययन शुरू करने से पहले सटीक मीटर रीडिंग लिखने की ज़रूरत है, फिर आपको बिना किसी त्रुटि के ठीक 10 मिनट के लिए इंजन चालू करना होगा। स्टॉपवॉच का उपयोग करके समय का ध्यान रखना सबसे अच्छा है, जो आपको समय पर इंजन को चालू और बंद करने की अनुमति देता है। इंजन बंद करने के बाद, आपको इंडक्शन मीटर से रीडिंग लेनी होगी और माप से पहले दर्ज किए गए मान को रीडिंग से घटाना होगा। अब हम संकेतकों को 6 से गुणा करते हैं। इन सरल मापों और गणनाओं से प्राप्त परिणाम किलोवाट में इंजन की सक्रिय शक्ति को सटीक रूप से प्रतिबिंबित करेंगे।
तकनीकी विशिष्टताओं को निर्धारित करना अधिक कठिन है कम शक्ति वाले इंजन, लेकिन उनकी शक्ति की गणना भी की जा सकती है, हालाँकि इसके लिए बहुत प्रयास की आवश्यकता होगी। इंजन की शक्ति निर्धारित करने का सबसे आसान तरीका समय की प्रति इकाई डिस्क की पूर्ण क्रांतियों की गणना करना है। उदाहरण के लिए, मीटर इंगित करता है कि 1200 चक्कर 1 किलोवाट/घंटा के बराबर है। यदि काउंटर एक मिनट के भीतर 10 चक्कर लगाता है, तो इस स्थिति में 10 को 60 (एक घंटे में मिनटों की संख्या) से गुणा किया जाना चाहिए और हमें प्रति घंटे 600 चक्कर मिलते हैं। 1200 को 600 से विभाजित करें और विद्युत मोटर की शक्ति प्राप्त करें। यह ध्यान रखना महत्वपूर्ण है कि माप की अवधि से सटीकता सीधे प्रभावित होती है। आप जितनी अधिक देर तक रीडिंग लेंगे, उतनी ही सटीकता से आप इंजन की शक्ति निर्धारित कर सकते हैं।
मोटर धारा निर्धारित करने की विधि
इलेक्ट्रिक मोटर को संचालित करने के लिए, उपयोगकर्ता को विभिन्न ऑपरेटिंग मापदंडों की आवश्यकता होती है। ऐसे उपकरण की दूसरी सबसे महत्वपूर्ण विशेषता खपत की गई विद्युत धारा की मात्रा है। वर्तमान गणना पद्धति मोटर में चरणों की संख्या और खपत वोल्टेज की मात्रा पर निर्भर करती है। सबसे आसान तरीका इससे जुड़े तीन-चरण मोटरों के लिए वर्तमान मूल्य की गणना करना है विद्युत नेटवर्कवोल्टेज 380 वी। ऐसे उपकरणों के लिए खपत की गई धारा की मात्रा 2 से गुणा की गई शक्ति के बराबर है। जैसे, तीन चरण मोटर 2 किलोवाट की शक्ति के साथ हम 2 से गुणा करते हैं और मोटर की वर्तमान खपत 4 एम्पीयर के बराबर प्राप्त करते हैं।
एक समय में मोटर करंट की मात्रा स्टार्ट के प्रकार पर निर्भर हो सकती है। प्रारंभ के प्रकार पर वर्तमान मान की निर्भरता नीचे दिए गए ग्राफ़ में दिखाई गई है।

यह एक सटीक सूत्र है, हालाँकि, इसमें कुछ अतिरिक्त चीजों की आवश्यकता होती है। यह ध्यान रखना अनिवार्य है कि ऐसी गणनाओं का परिणाम रेटेड लोड पर खपत की गई धारा की मात्रा है। इंजन चालू सुस्तीवर्तमान खपत बहुत कम होगी।
तीन-चरण अतुल्यकालिक मोटर की धारा की गणना करने के लिए, आप सूत्र का भी उपयोग कर सकते हैं:
In = 1000 Pn / √3 * (ηн * Un * cosφн),
इस सूत्र में:
- पीएन - रेटेड पावर;
- अन-रेटेड वोल्टेज;
- एन - नाममात्र दक्षता;
- Cosφн - रेटेड पावर फैक्टर।
एकल-चरण मोटर्स की वर्तमान खपत की गणना एक अलग सूत्र का उपयोग करके की जाती है। इस मामले में, उपयोगकर्ता को करंट निर्धारित करने के लिए मोटर पावर को मुख्य वोल्टेज से विभाजित करने की आवश्यकता होगी। गणना करने से पहले उस बिंदु पर वोल्टेज स्तर को मापा जाना चाहिए जहां मोटर जुड़ा हुआ है, क्योंकि डिवाइस चालू होने पर इनपुट बिंदु पर वोल्टेज स्तर कम हो जाएगा।
इस प्रकार, यदि मोटर की शक्ति 2 किलोवाट या 2000 डब्ल्यू है, और नेटवर्क वोल्टेज 220 वी है, तो 2000 को 220 से विभाजित किया जाना चाहिए। हमें 9 ए का मान मिलता है, जिसे इलेक्ट्रिक मोटर द्वारा खपत वर्तमान की मात्रा के रूप में लिया जाता है। .