बहुत बार ऐसी स्थितियाँ उत्पन्न होती हैं जब 20-30 साल पहले निर्मित मौजूदा उत्पादन उपकरणों पर इलेक्ट्रिक मोटरें खराब हो जाती हैं और उन्हें बदलने के लिए एक एनालॉग का चयन करना पड़ता है। विफलता के कई विकल्प हैं: यह इलेक्ट्रिक मोटर के लंबे समय तक ओवरलोड के दौरान हीटिंग के परिणामस्वरूप वाइंडिंग की विफलता हो सकती है, साथ ही वाइंडिंग तार इन्सुलेशन की प्राकृतिक उम्र बढ़ने के कारण भी हो सकती है; शाफ्ट अंत का यांत्रिक घिसाव; अचानक आघात भार या अत्यधिक रेडियल भार के परिणामस्वरूप शाफ्ट की पूर्ण विफलता; फ्रेम के पैरों का टूटना; फ्रेम पर अक्षीय पंखे के ब्लेड या पंखों का टूटना जो गर्मी हस्तांतरण में सुधार करता है।
चूंकि उत्पादन उपकरण के मुख्य ड्राइव तंत्र तीन-चरण हैं अतुल्यकालिक मोटर्स, फिर हम बिल्कुल उस मामले का विश्लेषण करेंगे जिसमें एक अतुल्यकालिक इलेक्ट्रिक मोटर के लिए एक एनालॉग का चयन करना आवश्यक है जो विफल हो गया है।
आइए निम्नलिखित स्थिति की कल्पना करें। परिसंचारी पानी को निकालने के लिए टैंक से पानी पंप करने के लिए तीन पंपों का एक समूह काम कर रहा है। पानी का उपयोग तकनीकी उपकरणों के शीतलन चक्र में किया जाता है, जिसके डाउनटाइम की अनुमति नहीं है। सभी पंप AO2 श्रृंखला के घरेलू स्तर पर उत्पादित इलेक्ट्रिक मोटरों से सुसज्जित हैं। इलेक्ट्रिक मोटरों की यह श्रृंखला पिछली शताब्दी के उत्तरार्ध में विकसित की गई थी और लंबे समय से बंद है।
पंपों का संचालन मोड इस प्रकार है। एक पंप को लगातार चालू रखा जाता है, दूसरे को थोड़े समय के लिए चालू किया जाता है यदि पहला उसे सौंपे गए कार्य का सामना नहीं कर पाता है और टैंक में पानी ओवरफ्लो हो जाता है। तीसरा पंप रिजर्व है।
सबसे पहले, हम आपका ध्यान इस तथ्य की ओर आकर्षित करते हैं कि इस कंपनी द्वारा उत्पादित इलेक्ट्रिक मोटरें दो मानकों के अनुसार निर्मित की जाती हैं: DIN और GOST। DIN (डॉयचेस इंस्टीट्यूट फर नॉर्मुंग) एक जर्मन राष्ट्रीय मानक है जिसका उपयोग लगभग पूरे यूरोप में किया जाता है। GOST पूर्व यूएसएसआर का एक राज्य मानक है, और अब रूस और सीआईएस देशों का एक अंतरराज्यीय मानक है। हम दोनों मानकों की इलेक्ट्रिक मोटरों को देखते हैं।
समग्र और कनेक्टिंग आयामों को देखकर शुरुआत करना बेहतर है। पृष्ठ 44 पर हमें डीआईएन के अनुसार इलेक्ट्रिक मोटरों के आयामों वाली एक तालिका मिलती है डिज़ाइनआईएम1001.
सबसे पहले, हम शाफ्ट के अंत के आयामों, यानी उसके व्यास और लंबाई में रुचि रखते हैं। अर्थ ढूंढ रहे हैं डी 1 = 60 मिमी और एल 1 = 140 मिमी, खंभों की संख्या के लिए - 4। हम शाफ्ट रोटेशन अक्ष की ऊंचाई के साथ इन मूल्यों (चित्रा 2) के अनुरूप इलेक्ट्रिक मोटर आरए225एस और आरए225एम के प्रकार पाते हैं। एच= 225 मिमी.
घूर्णन अक्ष की ऊँचाई, बिल्कुल समान शक्ति पर आधुनिक विद्युत मोटरें, पहले उत्पादित की तुलना में कम। यह निर्माताओं द्वारा तकनीकी दृष्टि से बेहतर विद्युत सामग्री के उपयोग के कारण है। इसलिए, वे अधिक कॉम्पैक्ट और हल्के हो जाते हैं।
आइए इलेक्ट्रिक मोटर के प्रकार के पदनाम को समझें, उदाहरण के लिए - RA225S4У3:
- आरए - इलेक्ट्रिक मोटरों की श्रृंखला। इस श्रृंखला में 15 मानक आकार हैं;
- 225 - शाफ्ट रोटेशन अक्ष की ऊंचाई;
- एस - फ्रेम की लंबाई के साथ स्थापना आयाम (स्टेटर की सशर्त लंबाई);
- 4 - ध्रुवों की संख्या;
- यू - जलवायु संस्करण;
- 3 - आवास श्रेणी।
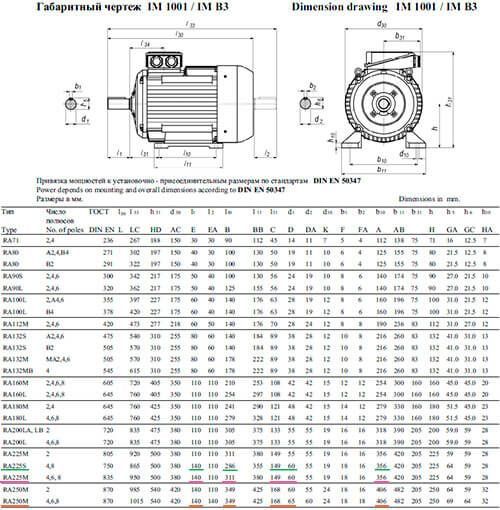
चित्र 2. आरए श्रृंखला मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 44
दोनों इलेक्ट्रिक मोटरों का शाफ्ट ऑफसेट है एल 31 = 149 मिमी; फ्रेम की चौड़ाई के साथ बढ़ते छेद के बीच की दूरी - बी 10 = 356 मिमी. RA225S इलेक्ट्रिक मोटर के लिए फ्रेम की लंबाई के साथ बढ़ते छेद के बीच की दूरी - एल 10 = 286 मिमी; इलेक्ट्रिक मोटर RA225M के लिए - एल 10 = 311 मिमी. सभी आयामों में से, केवल एक ही मेल खाता है, यह RA225M इलेक्ट्रिक मोटर के बढ़ते छेद के बीच फ्रेम की लंबाई के साथ की दूरी है - एल 10 = 311 मिमी. लेकिन यह कोई महत्वपूर्ण तर्क नहीं है, क्योंकि किसी भी मामले में, स्थापना के दौरान, आपको शाफ्ट के अंत के छोटे ओवरहैंग के कारण, बिस्तर में नए छेद ड्रिल करने होंगे।
आइए निम्नलिखित आकार RA250M की इलेक्ट्रिक मोटर के आयामों की जाँच करें (चित्र 2):
- घूर्णन अक्ष की ऊँचाई - एच= 250 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 65 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
बी 10 = 406 मिमी;
एल 10 = 349 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 168 मिमी.
निष्कर्ष। RA225S और RA225M इलेक्ट्रिक मोटर को स्थापित और समायोजित करने के लिए, आपको शीट मेटल से एक ट्रांज़िशन बेड बनाना होगा। RA250M इलेक्ट्रिक मोटर को स्थापित करने के लिए, आपको 65 मिमी शाफ्ट व्यास के लिए एक छेद और इस छेद के लिए एक की-वे की आवश्यकता होगी। दोनों ही मामलों में, मौजूदा बिस्तर में नए बढ़ते छेदों को चिह्नित करना और ड्रिल करना आवश्यक है।
आइए GOST के अनुसार इलेक्ट्रिक मोटरों के आयामों के साथ पृष्ठ 45-46 पर जाएँ।
उसी तरह, हम सबसे उपयुक्त प्रकार की इलेक्ट्रिक मोटरें ढूंढते हैं और तुलना के लिए उन आयामों को लिखते हैं जिनमें हमारी रुचि होती है।
A200L इलेक्ट्रिक मोटर (चित्र 3) के निम्नलिखित आयाम हैं:
- घूर्णन अक्ष की ऊँचाई - एच= 200 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 60 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 318 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 305 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 133 मिमी.
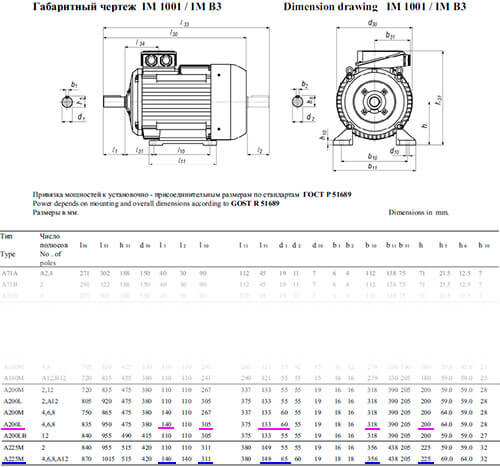
चित्र 3. श्रृंखला ए मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 45
इलेक्ट्रिक मोटर A225M (चित्र 3):
- घूर्णन अक्ष की ऊँचाई - एच= 225 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 65 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 356 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 311 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 149 मिमी.
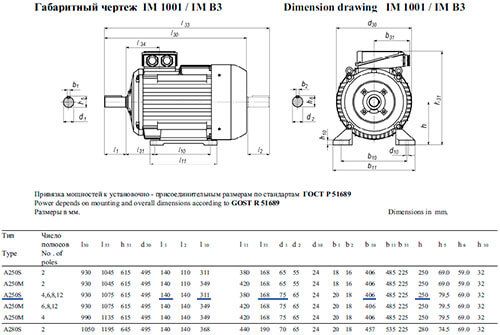
चित्र 4. श्रृंखला ए मोटर्स के समग्र, स्थापना और कनेक्शन आयामों की तालिका, पृष्ठ 46
इलेक्ट्रिक मोटर A250S (चित्र 4):
- घूर्णन अक्ष की ऊँचाई - एच= 250 मिमी;
- शाफ़्ट अंत व्यास - डी 1 = 75 मिमी;
- शाफ़्ट अंत की लंबाई - एल 1 = 140 मिमी;
- बढ़ते छेद के बीच फ्रेम की चौड़ाई के साथ दूरी - बी 10 = 406 मिमी;
- बढ़ते छेद के बीच फ्रेम की लंबाई के साथ दूरी - एल 10 = 311 मिमी;
- शाफ़्ट अंत ओवरहांग - एल 31 = 168 मिमी.
तुलना में आसानी के लिए, हम प्राप्त परिणामों को एक तालिका में सारांशित करते हैं।
| मोटर प्रकार | शाफ्ट रोटेशन अक्ष की ऊंचाई, मिमी | शाफ्ट अंत व्यास, मिमी | शाफ्ट अंत की लंबाई, मिमी | शाफ्ट अंत ओवरहांग, मिमी | बढ़ते छेदों के बीच फ्रेम की चौड़ाई में दूरी, मिमी | बढ़ते छेदों के बीच फ्रेम की लंबाई के साथ दूरी, मिमी |
प्राप्त परिणामों की तुलना करते हुए, किसी विशेष इंजन के उपयोग के बारे में तुरंत एक विशिष्ट निष्कर्ष निकालना असंभव है, क्योंकि सब कुछ इसकी स्थापना की संभावना पर निर्भर करता है। ध्यान में रखने की जरूरत है बाहरी आयामजिस स्थान पर इसे स्थापित किया जाएगा, यह वहां फिट होगा या नहीं। क्या मौजूदा बिस्तर में नए बढ़ते छेद ड्रिल करना संभव है? क्या इसके आगे उपयोग के लिए मौजूदा आधे-युग्मन में छेद करना संभव होगा या एक नया बनाना आवश्यक होगा, इत्यादि।
यदि नया बिस्तर बनाना संभव है, तो कम शाफ्ट रोटेशन अक्ष ऊंचाई वाली मोटर का उपयोग करना बेहतर होता है, क्योंकि समान रोटेशन ऊंचाई वाली इलेक्ट्रिक मोटर स्थापित करते समय, आपको अतिरिक्त बिजली के लिए अधिक भुगतान करना पड़ता है। उदाहरण के लिए, 45 किलोवाट की शक्ति वाली A200L4 इलेक्ट्रिक मोटर की लागत 75 किलोवाट की शक्ति वाली A250S4 इलेक्ट्रिक मोटर की लागत से 1.5 गुना कम है।
इस मामले में, हम मान लेंगे कि इंजन स्थापित करने में हमें कोई बाधा नहीं है। तब RA225M4 इलेक्ट्रिक मोटर प्रतिस्थापन के लिए सबसे उपयुक्त होगी। आइए इसकी ऊर्जा विशेषताओं पर नजर डालें। ऐसा करने के लिए, आइए पृष्ठ 16 पर जाएँ। हम इस प्रकार की इलेक्ट्रिक मोटर वाली लाइन ढूंढते हैं और देखते हैं:
- इंजन प्रकार - RA225M4;
- नाममात्र रोटेशन, एन - 1465 आरपीएम;
- मूल्यांकित शक्ति, पीनाममात्र - 45 किलोवाट;
- दक्षता कारक, η - 92.5%;
- पावर फैक्टर, क्योंकि φ
- 0,87
- वोल्टेज 380 वी पर रेटेड वर्तमान, मैंनामांकन - 86 ए.
इन नंबरों से चिंतित न हों, क्योंकि तालिका इंजन की शक्ति को दर्शाती है, यानी 100% लोड पर। और चूँकि हमारा भरा हुआ है नया इंजनपर होगा -
![]()
तो नाममात्र मोड में खपत की गई धारा होगी:
आपको अपने मोटर सुरक्षा उपकरणों को पुन: कॉन्फ़िगर करने की भी आवश्यकता नहीं होगी।
विषय में जलवायु संस्करणऔर प्लेसमेंट श्रेणियां, तो उन्हें बिल्कुल विफल इंजन (U3) के समान ही लिया जाना चाहिए। तब इलेक्ट्रिक मोटर का प्रकार इस तरह दिखेगा: RA225M4У3.
लेख के लेखक:एवगेनी ज़िवोग्लायडोव।
- जब आपको गायब प्लेट के साथ मरम्मत के लिए एक इलेक्ट्रिक मोटर प्राप्त होती है, तो आपको शक्ति और गति का निर्धारण करना होगा स्टेटर वाइंडिंग. सबसे पहले, आपको इलेक्ट्रिक मोटर की गति निर्धारित करने की आवश्यकता है। सिंगल-लेयर वाइंडिंग में गति निर्धारित करने का सबसे आसान तरीका कॉइल्स (कॉइल समूह) की संख्या की गणना करना है।
| वाइंडिंग पीसी में कॉइल्स (कॉइल समूह) की संख्या। | घूर्णन गति आरपीएम. मुख्य आवृत्ति पर f=50Hz. |
||
| तीन फ़ेज़ | सिंगल फेज़ कार्यशील वाइंडिंग में |
||
| एकल शब्द | दो पद | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
- तालिका के अनुसार, सिंगल-लेयर वाइंडिंग में 3000 और 1500 आरपीएम होते हैं। कुंडलियों की समान संख्या, प्रत्येक 6, आप उन्हें उनके कदम से स्पष्ट रूप से अलग कर सकते हैं। यदि कॉइल के एक तरफ से दूसरी तरफ एक रेखा खींची जाती है, और रेखा स्टेटर के केंद्र से होकर गुजरती है, तो यह 3000 आरपीएम वाइंडिंग है। ड्राइंग नंबर 1. इलेक्ट्रिक मोटर में 1500 आरपीएम स्टेप कम होता है।
| 2पी | 2 | 4 | 6 | 8 | 10 | 12 |
| आरपीएम एफ = 50 हर्ट्ज | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2पी | 14 | 16 | 18 | 20 | 22 | 24 |
| आरपीएम एफ = 50 हर्ट्ज | 428 | 375 | 333 | 300 | 272 | 250 |
| 2पी | 26 | 28 | 30 | 32 | 34 | 36 |
| आरपीएम एफ = 50 हर्ट्ज | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2पी | 38 | 40 | 42 | 44 | 46 | 48 |
| आरपीएम एफ = 50 हर्ट्ज | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
अतुल्यकालिक विद्युत मोटर की शक्ति का निर्धारण कैसे करें।
- इलेक्ट्रिक मोटर की शक्ति निर्धारित करने के लिए, आपको इलेक्ट्रिक मोटर शाफ्ट के घूर्णन अक्ष की ऊंचाई, कोर के बाहरी और आंतरिक व्यास, साथ ही इंजन कोर की लंबाई को मापने और आयामों के साथ इसकी तुलना करने की आवश्यकता है। एकीकृत श्रृंखला 4ए, एआईआर, ए, एओ... की इलेक्ट्रिक मोटरों की
- रेटेड शक्तियों को 4ए श्रृंखला अतुल्यकालिक इलेक्ट्रिक मोटरों के स्थापना आयामों के साथ जोड़ना:
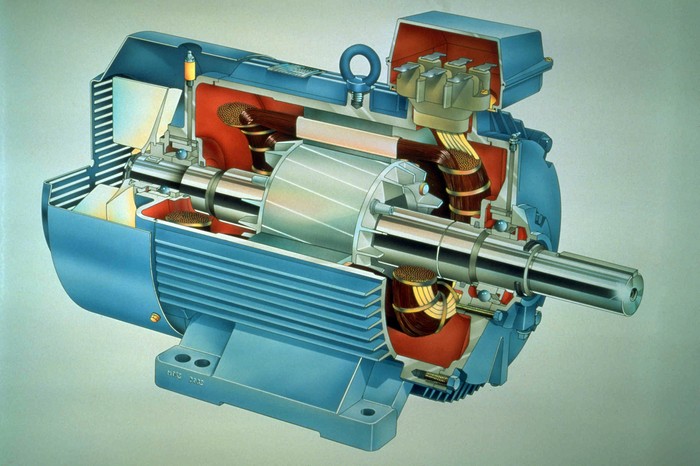
इलेक्ट्रिक मोटर एक इलेक्ट्रोमैकेनिकल कनवर्टर है जिसमें बिजली को यांत्रिक ऊर्जा में परिवर्तित किया जाता है, जिसका अंतिम प्रभाव गर्मी की रिहाई है। सभी विद्युत मशीनों के संचालन के लिए एक विद्युत मोटर आवश्यक है। ऐसी मोटर का चयन करने के लिए, आपको डिवाइस के सभी मापदंडों और उसकी विशेषताओं को ध्यान में रखना होगा, क्योंकि ये संकेतक मोटर के उद्देश्य और नेटवर्क के माध्यम से उस पर लोड को निर्धारित करने के लिए आवश्यक हैं। यह पूरी तरह से इलेक्ट्रिक मशीन की स्थायित्व और गुणवत्ता को निर्धारित करता है।
सामग्री
विद्युत मशीन के घटक
विद्युत मशीन का आधार चुंबकीय प्रेरण के साथ विद्युत प्रेरण का नियम है। इस तरह के उपकरण में एक स्टेटर या, जैसा कि इसे कहा जाता है, एक स्थिर भाग (अतुल्यकालिक, चर धारा की तुल्यकालिक मशीनों के लिए विशिष्ट) या एक प्रारंभ करनेवाला (निरंतर धारा के उपकरणों के लिए) और एक रोटर शामिल होता है, इसे एक सक्रिय या गतिशील भाग कहा जाता है ( परिवर्तनीय धारा की अतुल्यकालिक और तुल्यकालिक मशीनों के लिए) या एक आर्मेचर (निरंतर वर्तमान उपकरण)। कम शक्ति वाली वर्तमान मशीनों के लिए चुंबक (स्थिर अवस्था के) को एक स्थिर भाग के रूप में सक्रिय रूप से उपयोग किया जाता है।
इंजन की शक्ति
विद्युत शक्ति एक भौतिक मात्रा है जो विद्युत ऊर्जा के परिवर्तन या संचरण की दर से निर्धारित होती है। इसे समझना आसान बनाने के लिए, इलेक्ट्रीशियन करंट की गति को एक पाइप के माध्यम से तरल की गति के रूप में और वोल्टेज को इस तरल के स्तरों की स्थिति में अंतर के रूप में कल्पना करते हैं। विद्युत, कार्य करते समय, तरल पदार्थ की तरह उच्च से निम्न शक्ति की ओर गति करती है। इसका मतलब यह है कि विद्युत शक्ति 1 सेकंड में किए गए कार्य की मात्रा है, या जिस गति से कार्य किया जाता है। एक सेकंड के लिए सर्किट के क्रॉस सेक्शन से गुजरने वाली विद्युत धारा का योग ही सर्किट में वर्तमान ताकत है।
इसका तात्पर्य यह है कि विद्युत शक्ति सर्किट में वोल्टेज और करंट के अनुपात में बराबर होती है। वर्तमान शक्ति को निर्धारित करने के लिए, उपयोग की जाने वाली इकाई वाट है, जिसे संक्षेप में डब्ल्यू कहा जाता है।
भौतिक गणनाओं के लिए, मानक सूत्र N=A/t का उपयोग करने की प्रथा थी, जहाँ N शक्ति है, A कार्य है, t समय है।
विभिन्न अक्षर चिन्हों के साथ इस सूत्र के कई रूप हैं।
इंजन की शक्ति निर्धारित करें
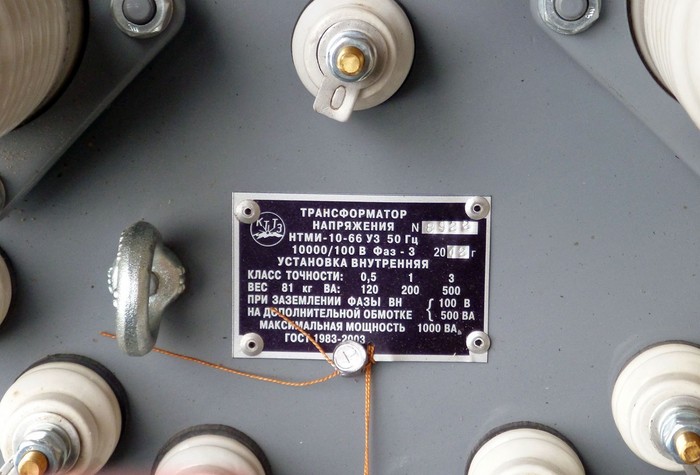
यदि आप लगातार इलेक्ट्रिक मशीनों का उपयोग करते हैं, तो आपने अक्सर नेमप्लेट देखी होंगी, जो वास्तव में, बिजली विकल्पों सहित सभी विशेषताओं को दर्शाती हैं। यदि आप नेमप्लेट की छवि को देखते हैं, तो आप विभिन्न मापदंडों के बीच पावर मान देख सकते हैं। जैसा कि आप देख सकते हैं, शिलालेख के विपरीत अधिकतम शक्ति 1000 W है। लेकिन यह इसकी विद्युत शक्ति नहीं है, जैसा कि उपभोक्ता अक्सर सोचता है।
नीचे दिया गया लेबल अधिकतम अनुमेय विद्युत धारा दर्शाता है। वे अक्सर अनुशंसित बिजली को नेमप्लेट पर लिखते हैं और इसे किलोवाट में निर्दिष्ट करते हैं।
तो, किसी विशिष्ट इंजन की प्रयोग करने योग्य शक्ति की गणना स्वयं से कैसे संभव है विद्युत नेटवर्क. ऐसा करने के लिए, आपको अध्ययन के तहत डिवाइस की उसी नेमप्लेट पर अन्य संकेतकों को देखने की जरूरत है - ये दक्षता और cosφ हैं। जहां दक्षता को कभी-कभी संक्षिप्त नाम दक्षता, या अक्षर η द्वारा दर्शाया जाता है। सबसे पहले, आपको शाफ्ट पर यांत्रिकी की उपयोगी शक्ति और दक्षता के बीच संबंध को ध्यान में रखना होगा। इन मानों के होने पर, आप विद्युत नेटवर्क से इंजन द्वारा खपत की गई बिजली की आसानी से गणना कर सकते हैं। हम संबंध से पता लगाते हैं: Ra=P/η। लेकिन ये अभी परिणाम नहीं हैं. यह याद रखना चाहिए कि विद्युत उपकरण नेटवर्क से सक्रिय और प्रतिक्रियाशील दोनों ऊर्जा का उपभोग करते हैं। इंजन द्वारा उपयोग की गई कुल शक्ति की गणना करते समय, शक्ति त्रिकोण से अनुपात प्राप्त करना आवश्यक है।
इलेक्ट्रिक मोटर की शक्ति का निर्धारण कैसे करें
तो चलिए विकल्पों पर चलते हैं। अर्थात्, विद्युत मोटर की शक्ति निर्धारित करने के लिए:
- वर्तमान द्वारा. हम मोटर को एक निश्चित लोड (वोल्टेज) के साथ विद्युत नेटवर्क से जोड़ते हैं। अपने अनुक्रम में प्रत्येक कुंडल से वैकल्पिक रूप से एक एमीटर जोड़कर, हम कामकाज को मापते हैं बिजलीएम्पीयर में इंजन. हम वर्तमान माप के परिणामस्वरूप प्राप्त धाराओं की मात्रा निर्धारित करते हैं। हम मात्रा को वोल्टेज संकेतक से गुणा करते हैं, और परिणामस्वरूप - वाट में विद्युत इंजन की खपत की गई शक्ति;
- आकार के अनुसार. हम निश्चित भाग के मूल के एंडोमेंट्रीकुलर कैलिबर, इसकी लंबाई, वेंटिलेशन चैनलों के साथ सेंटीमीटर में निर्धारित करते हैं। हम उस नेटवर्क में करंट बदलने की आवृत्ति का पता लगाते हैं जिससे एक निश्चित इलेक्ट्रिक मोटर जुड़ा हुआ है और शाफ्ट की एक साथ रोटेशन आवृत्ति। निरंतर पृथक्करण निर्धारित करने के लिए, हम शाफ्ट की एक साथ पुनरावृत्ति द्वारा कोर कैलिबर को पुन: उत्पन्न करते हैं और 3.14 से गुणा करते हैं और उसी क्रम में 120 (3.14 डी एन/(120 एफ)) और नेटवर्क दोहराव से विभाजित करते हैं। इस प्रकार, हमने डिवाइस का विभाजन सीखा, जिसे ध्रुवीय के रूप में जाना जाता है। हम पाते हैं कि कितने पोल हैं, नेटवर्क बिजली की बार-बार आने वाली पुनरावृत्ति दर को 60 से गुणा करते हैं, और परिणामी संख्या को शाफ्ट क्रांति की पुनरावृत्ति दर से विभाजित करते हैं। हम लिए गए मानों को दो से गुणा करते हैं। समाधान के आधार पर, हम "ध्रुवों की संख्या पर एक स्थिर इंजन सी की निर्भरता का निर्धारण" तालिका में देखते हैं और पाते हैं कि हमारी संख्या स्थिर है। हम परिणामी स्थिरांक को वर्ग कोर कैलिबर, इसकी एक साथ घूर्णन आवृत्ति और लंबाई से गुणा करते हैं। हम परिणामी संख्या को 10^(-6) (P = C D² l n 10^(-6)) से गुणा करते हैं। किलोवाट में विद्युत शक्ति का मूल्य परिभाषित;
- विद्युत मोटर द्वारा उत्पादित शक्ति। हम टैकोमीटर का उपयोग करके प्रति सेकंड घूर्णन में अध्ययन के तहत डिवाइस के शाफ्ट की घूर्णन गति ज्ञात करते हैं। फिर हम एक डायनेमोमीटर लेते हैं और इलेक्ट्रिक मोटर का कर्षण बल निर्धारित करते हैं। और परिणामस्वरूप, वाट में शक्ति निर्धारित करने के लिए, हम गति को 6.28 से गुणा करते हैं, साथ ही शाफ्ट के बल और त्रिज्या से, बाद वाले को हम एक रूलर से मापते हैं।
टिप्पणी! प्रत्येक मोटर के लिए एक निश्चित संख्या में चरणों के लिए एक नेटवर्क होता है। एक उदाहरण तीन-चरण मोटर है, जिसे केवल तीन-चरण प्रत्यावर्ती धारा नेटवर्क से संचालित होने के लिए डिज़ाइन किया गया है।
शाफ्ट व्यास द्वारा विद्युत मोटर शक्ति का निर्धारण। इलेक्ट्रिक मोटरों के उपयोग ने न केवल उद्योग में, बल्कि रोजमर्रा की जिंदगी में भी अपना अनुप्रयोग पाया है। एक इलेक्ट्रिक मोटर में कई पैरामीटर होते हैं, मोटर को कनेक्ट करते समय उनमें से कुछ महत्वपूर्ण हैं शक्ति और विद्युत प्रवाह। ये पैरामीटर आपको मोटर को बिजली देने के लिए आवश्यक वायरिंग के व्यास के साथ-साथ स्वचालित और रिले सुरक्षा का सही ढंग से चयन करने की अनुमति देते हैं। हम अभी यह पता लगाएंगे कि इलेक्ट्रिक मोटर की शक्ति का सही ढंग से निर्धारण कैसे किया जाए, साथ ही करंट का पता कैसे लगाया जाए।
इंजन की शक्ति, साथ ही इसके वर्तमान को समझने के लिए, इसके पासपोर्ट को देखना पर्याप्त है, जो सभी को इंगित करता है विशेष विवरण, या रिलीज के समय निर्माता द्वारा इलेक्ट्रिक मोटर पर चिपकाई गई एक विशेष सूचना प्लेट पर। इसके अलावा, यह विद्युत नेटवर्क से उपभोग की गई इंजन की सक्रिय शक्ति को इंगित करता है।
सभी बिजली खपत में सक्रिय शक्ति और प्रतिक्रियाशील इलेक्ट्रिक मोटर की शक्ति दोनों शामिल हैं। उदाहरण के लिए, घरेलू विद्युत मीटर का उपयोग करके आप खपत की गई सक्रिय विद्युत ऊर्जा की गणना कर सकते हैं। और औद्योगिक उद्यमों में विद्युत मोटरों का संचालन करते समय, प्रतिक्रियाशील ऊर्जा पर नियंत्रण रखा जाता है।
घर पर, हम इलेक्ट्रिक मोटर की शक्ति निर्धारित करते हैं
यह काम बिजली मीटर के जरिये किया जा सकता है. माप शुरू करने से पहले, आपको नेटवर्क से सभी विद्युत उपकरणों को बंद करना होगा, जिसमें प्रकाश व्यवस्था, साथ ही विद्युत पैनल से जुड़े उपकरण शामिल हैं, अर्थात। सभी उपभोक्ताओं की बिजली बंद होनी चाहिए।
इलेक्ट्रिक मोटर चालू करें और इसे पांच मिनट तक लोड के तहत चलने दें। आगे की माप बिजली मीटर के मॉडल पर निर्भर करती है:
यदि बिजली मीटर इलेक्ट्रॉनिक है, तो लोड किलोवाट में निर्धारित किया जाएगा, जो वर्तमान में उससे जुड़ा है;
यदि मीटर एक डिस्क इंडक्शन मॉडल है, तो इसे किलोवाट/घंटा में मीटर किया जाता है, और बिजली मापने के लिए, आपको अंतिम उपलब्ध मीटर रीडिंग रिकॉर्ड करनी चाहिए और इंजन चालू करना चाहिए
इसके लिए दस मिनट तक काम करना होगा. इसे बंद करने के बाद, आपको रीडिंग में अंतर ढूंढना होगा और परिणाम को छह से गुणा करना होगा, परिणामी मान इलेक्ट्रिक मोटर की सक्रिय शक्ति को व्यक्त करता है।
विद्युत मोटर की विद्युत धारा खपत निर्धारित करने के लिए आपको यह करना होगा:
एकल-चरण विद्युत नेटवर्क में, आपको बस गणितीय गणना करने की आवश्यकता है: विद्युत मोटर की उपलब्ध शक्ति को ज्ञात वोल्टेज मान से विभाजित करें;
में तीन चरण की मोटरें, आपको बस किलोवाट में ज्ञात शक्ति को दो से गुणा करना होगा।
किसी को सक्षम करना विद्युत मोटरएक प्रारंभिक धारा की घटना के साथ होता है, जिसका परिमाण विद्युत मोटर के मॉडल, घूर्णी गति और अन्य संकेतकों पर निर्भर करता है। आरंभिक विद्युत धारा रोटर को ऊपर की ओर धकेलने के लिए उत्पन्न होती है।
स्पिन-अप के क्षण में, आगमनात्मक प्रतिक्रिया प्रकट होती है, जिससे वर्तमान मूल्य में कमी आती है। ऊर्जा वृद्धि अन्य विद्युत उपकरणों के संचालन को प्रभावित करती है जो एक ही लाइन से संचालित होते हैं और इलेक्ट्रॉनिक्स की खराबी में योगदान कर सकते हैं। विशेष उपकरणों का उपयोग करके इनरश करंट को कम किया जाता है। इस प्रकार, विद्युत मोटर की शक्ति निर्धारित की जाती है और उसकी धारा ज्ञात की जाती है।
इसके अलावा, इलेक्ट्रिक मोटर शुरू करते समय विशेष उपकरणों का उपयोग उनके लंबे संचालन में योगदान देता है।