Mitmefaasiliste süsteemide eripäraks on võime luua mehaaniliselt statsionaarses seadmes pöörlev magnetväli.
Mähis ühendatud allikaga vahelduvvoolu, moodustab pulseeriva magnetvälja, st. magnetväli, mille suurus ja suund muutuvad.
Võtame silindri siseläbimõõduga D. Silindri pinnale asetame kolm rulli, mis on ruumiliselt nihkunud üksteise suhtes 120 o võrra. Ühendame mähised kolmefaasilise pingeallikaga (joonis 12.1). Joonisel fig. Joonisel 12.2 on kujutatud kolmefaasilise süsteemi moodustavate hetkevoolude muutuste graafik.
Iga mähis loob pulseeriva magnetvälja. Mähiste magnetväljad üksteisega interakteerudes moodustavad pöörleva magnetvälja, mida iseloomustab tekkiva magnetinduktsiooni vektor
Joonisel fig. 12.3 näitab iga faasi magnetinduktsiooni vektoreid ja saadud vektorit, mis on konstrueeritud kolmeks ajahetkeks t1, t2, t3. Pooli telgede positiivsed suunad on tähistatud +1, +2, +3.
Hetkel t = t 1 on vool ja magnetinduktsioon poolis A-X positiivsed ja maksimaalsed, mähised B-Y ja C-Z on identsed ja negatiivsed. Saadud magnetinduktsiooni vektor on võrdne poolide magnetilise induktsiooni vektorite geomeetrilise summaga ja langeb kokku mähise A-X teljega. Hetkel t = t 2 on voolud mähistes A-X ja C-Z suuruselt võrdsed ja suunalt vastupidised. Faasi B vool on null. Saadud magnetilise induktsiooni vektor pöörati päripäeva 30 o. Hetkel t = t 3 on voolud mähistes A-X ja B-Y suuruselt identsed ja positiivsed, vool in faas C-Z on maksimaalne ja negatiivne, siis paikneb tekkiva magnetvälja vektor telje negatiivses suunas mähised C-Z. Vahelduvvoolu perioodil pöörleb tekkiva magnetvälja vektor 360 o.
Magnetvälja pöörlemiskiirus või sünkroonne pöörlemiskiirus
 (12.1)
(12.1)
kus P on pooluste paaride arv.
Joonisel fig. 12.1, luua kahepooluseline magnetväli, pooluste arvuga 2P = 2. Välja pöörlemissagedus on 3000 p/min.
Neljapooluselise magnetvälja saamiseks on vaja silindri sisse asetada kuus pooli, kaks iga faasi kohta. Seejärel pöörleb magnetväli valemi (12.1) kohaselt kaks korda aeglasemalt, n 1 = 1500 pööret minutis.
Pöörleva magnetvälja saamiseks peab olema täidetud kaks tingimust.
1. Omama vähemalt kahte ruumiliselt nihutatud mähist.
2. Ühendage poolidega faasivälised voolud.
12.2. Asünkroonsed mootorid.
Disain, tööpõhimõte
Asünkroonsel mootoril on liikumatuks
osa nimega staator
, Ja pöörlev
osa nimega rootor
. Staator sisaldab mähist, mis loob pöörleva magnetvälja.
Asünkroonsed mootorid on oravapuuri ja mähitud rootoriga.
Alumiiniumist või vasest vardad asetatakse lühise rootori piludesse. Varraste otsad on suletud alumiiniumist või vasest rõngastega. Staator ja rootor on valmistatud elektrotehnilistest teraslehtedest, et vähendada pöörisvoolukadusid.
Faasirootoril on kolmefaasiline mähis (ees kolmefaasiline mootor). Faaside otsad on ühendatud ühiseks üksuseks ja algused tuuakse välja kolmele võllile asetatud liugrõngale. Rõngadele asetatakse fikseeritud kontaktiharjad. Harjadega on ühendatud käivitusreostaat. Pärast mootori käivitamist vähendatakse käivitusreostaadi takistust järk-järgult nullini.
Tööpõhimõte asünkroonne mootor Vaatame joonisel 12.4 toodud mudelit.
Kujutagem ette staatori pöörlevat magnetvälja sünkroonse pöörlemiskiirusega n 1 pöörleva püsimagneti kujul.
Suletud rootori mähise juhtides indutseeritakse voolud. Magneti poolused liiguvad päripäeva.
Pöörlevale magnetile asetatud vaatlejale tundub, et magnet on paigal ja rootori mähise juhid liiguvad vastupäeva.
Parema käe reegliga määratud rootori voolude suunad on näidatud joonisel fig. 12.4.
Riis. 12.4
Vasaku käe reegli abil leiame rootorile mõjuvate ja selle pöörlemist tekitavate elektromagnetiliste jõudude suuna. Mootori rootor hakkab pöörlema pöörlemiskiirusega n 2 staatorivälja pöörlemissuunas.
Rootor pöörleb asünkroonselt, st selle pöörlemissagedus n 2 on väiksem kui staatorivälja pöörlemissagedus n 1.
Staatori ja rootori väljade suhtelist kiiruste erinevust nimetatakse libisemiseks.
Libisemine ei saa olla nulliga võrdne, kuna välja ja rootori samadel kiirustel lakkaks voolude induktsioon rootoris ja seetõttu puudub elektromagnetiline pöördemoment.
Pöörlevat elektromagnetilist pöördemomenti tasakaalustab pidurdusmoment M em = M 2.
Mootori võlli koormuse suurenedes muutub pidurdusmoment suuremaks kui pöörlemismoment ja libisemine suureneb. Selle tulemusena suurenevad EMF ja rootori mähises indutseeritud voolud. Pöördemoment suureneb ja muutub võrdseks pidurdusmomendiga. Pöördemoment võib suureneda libisemisega kuni teatud maksimumväärtuseni, misjärel pidurdusmomendi edasise suurenemisega väheneb pöördemoment järsult ja mootor seiskub.
Seiskunud mootori libisemine on võrdne ühega. Väidetavalt töötab mootor lühiserežiimis.
Koormamata asünkroonmootori pöörlemiskiirus n 2 on ligikaudu võrdne sünkroonse sagedusega n 1. Koormamata mootori libisemine S 0. Öeldakse, et mootor töötab režiimis tühikäik.
Mootorrežiimis töötava asünkroonse masina libisemine varieerub nullist üheni.
Asünkroonne masin võib töötada generaatori režiimis. Selleks peab selle rootorit pöörama kolmanda osapoole mootor staatori magnetvälja pöörlemissuunas sagedusega n 2 > n 1. Asünkroonse generaatori libisemine. 
Asünkroonne masin võib töötada elektrilise masina pidurirežiimis. Selleks on vaja selle rootorit pöörata staatori magnetvälja pöörlemissuunale vastupidises suunas.
Selles režiimis S > 1. Tavaliselt kasutatakse asünkroonseid masinaid mootorirežiimis. Asünkroonmootor on tööstuses kõige levinum mootoritüüp. Välja pöörlemissagedus asünkroonmootoris on rangelt seotud võrgu sagedusega f 1 ja staatori pooluste paaride arvuga. Sagedusel f 1 = 50 Hz on järgmised pöörlemissagedused.
Lukustatud rootoriga asünkroonmasin töötab nagu trafo. Peamine magnetvoog indutseerib staatori ja statsionaarse rootori mähistes EMF E 1 ja E 2k.
kus Ф m on ühendatud peamise magnetvoo maksimaalne väärtus
staatori ja rootori mähised;
W 1 ja W 2 - staatori ja rootori mähiste pöörete arv;
f 1 - võrgu pinge sagedus;
K 01 ja K 02 - staatori ja rootori mähiste mähise koefitsiendid.
Magnetinduktsiooni soodsama jaotuse saavutamiseks staatori ja rootori vahelises õhupilus ei koondu staatori ja rootori mähised ühe pooluse sisse, vaid on jaotatud piki staatori ja rootori ümbermõõtu. Jaotatud mähise EMF on väiksem kui kontsentreeritud mähise EMF
KASANI RIIK TEHNOLOOGIAALNE
ÜLIKOOL
Elektrotehnika osakond
Teema kokkuvõte:
Lõpetatud:
Art. gr. 5141-4
Tukhbatov I.M.
Kontrollitud:
Miljašov A.N.
Kaasan 2005
Üldine teave…………………………………………………………………………………..3
Kolmefaasilise asünkroonse masina projekteerimine…………………………………………………..3
Kolmefaasilise asünkroonse masina töörežiim……………………………………………………………..4
Asünkroonmootori staatori pöörlev magnetväli………………………………..5
Rootori pöörlev magnetväli ja töötav pöörlev magnetväli Ac.M…….6
As.M universaalsed omadused………………………………………………………….7
Käivitage vahelduvvoolu mootor pooleli……………………………………………………………………………………….………8
Vahelduvvoolumootori pöörlemiskiiruse reguleerimise meetodid................................................ ......................................9
1. Üldinfo.
Numbri järgi erinevat tüüpi Kaasaegsetes elektrimasinates on tänapäeval kõige levinum asünkroonne harjadeta masin, mida tavaliselt kasutatakse mootorina. Asünkroonne masin(Ac.M.) on masin, milles töötamise ajal ergastatakse pöörlev magnetväli, kuid rootor pöörleb asünkroonselt, s.t. mille nurkkiirus erineb välja nurkkiirusest. Selle leiutas M.O. Dolivo-Dobrovolsky 1888. aastal, kuid tänaseni on see suures osas säilitanud lihtsa vormi, mille andekas vene leiutaja talle andis. As.M. koosneb kolmest ühisele südamikule asetatud statsionaarsest mähist (täpsemalt mähistest) ja nende vahele asetatud neljandast, pöörlevast mähist.
As.M. väikese võimsusega on kahejuhtmelisest võrgust toidetavate seadmete puhul sageli ühefaasilised. Selliseid masinaid kasutatakse laialdaselt kodumasinates.
As.M. üldine puudus. - see on nende töörežiimide reguleerimise suhteline keerukus ja kahjumlikkus.
2. Kolmefaasilise asünkroonmasina projekteerimine.
Kolmefaasiline As.M. koosneb kahest põhiosast: statsionaarsest staatorist ja pöörlevast rootorist.
Staatori disain. Staator As.M. See on õõnes silinder, mis on kokku pandud elektrilistest terasplaatidest, mis on üksteisest isoleeritud lakikihiga (joonis 1). Staatori siseküljel asuvatesse soontesse asetatakse kolm faasimähist. Iga faasimähis sisaldab ühte või mitut poolirühma, mis on ühendatud järjestikku ja asuvad piki staatori ümbermõõtu üksteisest võrdsel kaugusel.
 Faasimähised on üksteisega ühendatud tähe või kolmnurga abil ja ühendatud kolmefaasilise võrguga. Faasimähistes olevad voolud ergastavad masinas staatori pöörleva magnetvälja pooluste paaride arvuga lk, võrdub mähiserühmade arvuga ühes faasimähises. See saavutatakse faasimähiste vastastikuse paigutusega, mille käigus nende poolirühmad nihutatakse piki staatori ümbermõõtu külgneva faasimähise poolirühmade suhtes 120° nurga all.
lk.
Faasimähised on üksteisega ühendatud tähe või kolmnurga abil ja ühendatud kolmefaasilise võrguga. Faasimähistes olevad voolud ergastavad masinas staatori pöörleva magnetvälja pooluste paaride arvuga lk, võrdub mähiserühmade arvuga ühes faasimähises. See saavutatakse faasimähiste vastastikuse paigutusega, mille käigus nende poolirühmad nihutatakse piki staatori ümbermõõtu külgneva faasimähise poolirühmade suhtes 120° nurga all.
lk.
Mitme pöördega mähiserühma paigutamiseks staatori piludesse jagatakse see q järjestikku ühendatud sektsioonid w c pöördeid igas sektsioonis. Võimalikud on sama ja ebavõrdse mähise sammuga lõigud y. Esimesel juhul nihutatakse iga sektsiooni külgi piki staatori ümbermõõtu 180° nurga all. lk, mis vastab ühele pooluste jaotusele y=τ, need. staatori ümbermõõdu pikkus pooluse kohta. Teisel juhul on poolirühma sektsioonid üksteise sees pesastatud, st. nende looklev helikõrgus τ< y< τ .
Faasimähiste jaotus mitme pilu vahel ei paranda mitte ainult silindrilise staatori konstruktsiooni kasutamist, vaid määrab ka vajaliku magnetvälja jaotuse staatori ja rootori vahelises õhupilus.
Staatori südamik on valmistatud avatud või poolavatud piludega, poolavatud pilude kasutamine vähendab magnettakistust ja sellest tulenevalt magnetiseerimisvoolu. Avatud soontega lihtsustatakse sektsioonide paigaldamist ja suureneb isolatsiooni töökindlus.
Rootori disain. As.M. Need erinevad peamiselt rootori konstruktsiooni poolest. Rootor Ac.M. on silindrikujuline südamik (joonis 2), mis on kokku pandud elektriliste terasplaatidest, mis on üksteisest lakiga isoleeritud. Rootori südamik on paigaldatud laagritele paigaldatud võllile. Rootori mähise pöörded asuvad rootori piludes.
IN  kasutatakse enamikus mootorites orava puuri rootor. See on palju odavam ja, mis on väga oluline, on oravapuuriga rootoriga hooldamine palju lihtsam. Oravapuurootori mähis on valmistatud vasest või alumiiniumist varrastest silindrilise puuri kujul, mis sisestatakse südamiku soontesse ilma isolatsioonita. Varraste otsaotsad on lühises varrastega samast materjalist rõngastega (nn “oravaratas”). Sageli tehakse lühismähis, täites rootori pilud sula alumiiniumiga.
kasutatakse enamikus mootorites orava puuri rootor. See on palju odavam ja, mis on väga oluline, on oravapuuriga rootoriga hooldamine palju lihtsam. Oravapuurootori mähis on valmistatud vasest või alumiiniumist varrastest silindrilise puuri kujul, mis sisestatakse südamiku soontesse ilma isolatsioonita. Varraste otsaotsad on lühises varrastega samast materjalist rõngastega (nn “oravaratas”). Sageli tehakse lühismähis, täites rootori pilud sula alumiiniumiga.
KOHTA 
 mähis haava rootor, mida nimetatakse ka libisemisrõnga rootoriks, on valmistatud isoleeritud traadiga. Enamasti on see kolmefaasiline, sama palju mähiseid kui antud mootori staatorimähisel. Rootori kolm faasimähist on rootori enda külge ühendatud tähega ja nende vabad otsad on ühendatud kolme masina võllile paigaldatud, kuid sellest võllist eraldatud libisemisrõngaga. Fikseeritud harjahoidjatele paigaldatud harjad asetatakse rõngastele. Rõngaste ja harjade kaudu on rootori mähis ühendatud kolmefaasilise reostaadiga (joonis 3). Reostaadi lisamine rootori vooluringi võimaldab oluliselt parandada mootori käivitustingimusi - vähendada käivitusvoolu ja suurendada esialgset pöördemomenti; lisaks saate rootori ahelas sisalduva reostaadi abil sujuvalt reguleerida mootori pöörlemiskiirust.
mähis haava rootor, mida nimetatakse ka libisemisrõnga rootoriks, on valmistatud isoleeritud traadiga. Enamasti on see kolmefaasiline, sama palju mähiseid kui antud mootori staatorimähisel. Rootori kolm faasimähist on rootori enda külge ühendatud tähega ja nende vabad otsad on ühendatud kolme masina võllile paigaldatud, kuid sellest võllist eraldatud libisemisrõngaga. Fikseeritud harjahoidjatele paigaldatud harjad asetatakse rõngastele. Rõngaste ja harjade kaudu on rootori mähis ühendatud kolmefaasilise reostaadiga (joonis 3). Reostaadi lisamine rootori vooluringi võimaldab oluliselt parandada mootori käivitustingimusi - vähendada käivitusvoolu ja suurendada esialgset pöördemomenti; lisaks saate rootori ahelas sisalduva reostaadi abil sujuvalt reguleerida mootori pöörlemiskiirust.
Joonisel 4 on näidatud Ac.M. lühisega ( A) ja faas ( b) rootor samaväärsetel ahelatel.
Lühisjuhtme mähis koosneb m-osadest. Staatori induktiivse pöörleva magnetvälja faasinihe kahes külgnevas varras on võrdne
p – mootori pooluste paaride arv;
 2 – pöörete arv igas faasis.
2 – pöörete arv igas faasis.
Rootori ahel olgu avatud, st. selles puudub vool, rootorile ei mõju elektromagnetilised jõud ja see on liikumatu. Kui rootor on paigal, on selle mähises indutseeritud EMF-i sagedus võrdne staatori mähise vooluahela voolude sagedusega.
f – võrgu sagedus, 50 Hz;
Kui rootorit pöörata sagedusega n 2, järgides staatori pöörlevat magnetvälja, siis indutseeritud mähise EMF sagedus väheneb ja muutub võrdseks.

Kui rootori ahel on suletud, moodustuvad selles olevad voolud:
1) Mitmefaasiline süsteem, faaside arvuga m 2 =N, oravapuuriga rootori puhul.
2) Kolmefaasiline süsteem, faaside arvuga m 2 = 3, faasirootori puhul => voolud rootorimähises on sarnased staatorimähiste vooludega, peab ergastama pöörleva magnetvälja.
34. Asünkroonmootori töötav pöörlev magnetväli
n rel. on selle välja pöörlemissagedus rootori suhtes.
Sest rootor ise pöörleb samas suunas sagedusega n 2, siis selle väli pöörleb ruumis sagedusega, mis on võrdne
Need. Rootori väli pöörleb sünkroonselt staatoriväljaga, see on iseloomulik tingimus energia täielikuks ülekandmiseks staatorist rootorile.
Lisamisel moodustab staatori ja rootori pöörlev magnetväli asünkroonmootori töötava pöörleva magnetvälja, mis toimib sama ühenduslülina staatori ja rootori mähiste vahel, nagu vahelduv magnetväli trafo südamikus, edastades energiat primaarmähis sekundaarmähisesse. See on täpselt see, mida töövaldkonda peab tundma, et analüüsida protsesse staatori ja rootori ahelates.
35. Asünkroonmootori mehaanilised omadused
Mootori stabiilseks tööks on oluline, et tasakaal pöörlemis- ja pidurdusmomentide vahel tekiks automaatselt, mootori võlli koormuse suurenemisel suureneb pidurdusmoment ja pöördemoment peaks vastavalt suurenema.
P mech – mehaaniline jõud mootori võllil;
2 – rootori nurkkiirus
See töötava mootori pöördemomentide tasakaalustamine toimub järgmiselt: võlli koormuse suurenemisel osutub pidurdusmoment suuremaks kui pöördemoment, mille tagajärjel rootori kiirus väheneb ja libisemine suureneb. Libisemise suurenemine põhjustab pöördemomendi suurenemist. Momentide tasakaal taastub libisemise suurenedes.


R 2 – aktiivne takistus;
X ras.2 – induktiivne lekkereaktants.


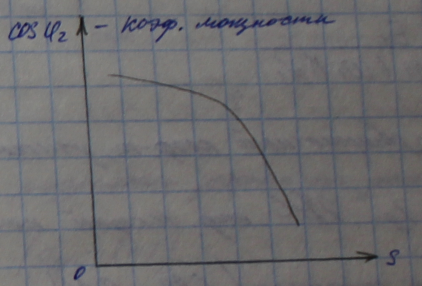
 - Võimsustegur.
- Võimsustegur.
36) Alalisvoolu elektrimasinate (MPT) konstruktsioon ja tööpõhimõte, kasutusvaldkonnad
MPT koosneb statsionaarsest osast, milles põhimagnetväli on ergastatud, ja pöörlevast osast, milles indutseeritakse emf. Selle emfi voolud, mis suhtlevad peamise magnetväljaga, loovad pöördemomendi (mootorirežiimis pöörleb, generaatori režiimis pidurdab).
Fikseeritud osa koosneb raamist ja selle külge kinnitatud postidest. Poolused jagunevad põhilisteks, milles ergastatakse põhimagnetvoogu, ja täiendavateks, mis paigaldatakse masina ümberlülitamise parandamiseks.

Tööpõhimõte
Auto alalisvool võib töötada kahes režiimis: mootor ja generaator, olenevalt sellest, millist energiat sellele antakse - kui elektriline, siis elektrimasin töötab elektrimootori režiimis ja kui mehaaniline, siis generaatori režiimis. Elektrimasinad on aga reeglina tootja poolt konstrueeritud ühe kindla töörežiimi jaoks – kas generaatori või elektrimootorina.
Kasutusala
Elektrilisi alalisvoolumasinaid kasutatakse nii generaatori kui ka mootorina. Alalisvoolumootoreid kasutatakse kõige laialdasemalt:
Neid kasutatakse laialdaselt tõsteseadmete juhtimiseks kraanamootoritena.
Sõidetud Sõiduk veomootoritena.
Automaatikaseadmete juhtimiseks.
Valtsimistehaste juhtimiseks.
Tavaliste tõstukite juhtimiseks.
Vastuvõtmise tingimused:
1) vähemalt kahe mähise olemasolu;
2) voolud mähistes peavad olema faasis erinevad
3) mähiste teljed peavad olema ruumis nihutatud.
Kolmefaasilises masinas ühe pooluste paariga (p=1) tuleb mähiste teljed ruumis nihutada 120° nurga võrra, kahe pooluste paariga (p=2) tuleb mähiste teljed ruumis nihutada 120° nurga võrra. mähised tuleb ruumis nihutada 60° nurga jne.
Vaatleme magnetvälja, mis luuakse kolmefaasilise mähise abil, millel on üks pooluste paar (p = 1). Faasimähiste teljed nihkuvad ruumis 120° nurga võrra ja nende poolt tekitatud üksikute faaside (BA, BB, BC) magnetinduktsioonid nihkuvad ruumis samuti 120° nurga võrra.
Iga faasi tekitatud magnetilise induktsiooni väljad, samuti nendesse faasidesse antavad pinged on siinuskujulised ja erinevad faaside poolest 120° nurga võrra.
Tööpõhimõte
Staatori mähisele rakendatakse pinget, mille mõjul liigub vool läbi nende mähiste ja tekitab pöörleva magnetvälja. Magnetväli mõjub rootori varrastele ja vastavalt magnetinduktsiooni seadusele indutseerib neis emfi. Indutseeritud EMF-i mõjul tekib rootori varrastesse vool. Rootori varraste voolud loovad oma varraste magnetvälja, mis interakteeruvad staatori pöörleva magnetväljaga. Selle tulemusena mõjub igale vardale jõud, mis ringi ümber liites tekitab rootori pöörleva elektromagnetilise momendi.
Võttes faasi A (φA) algse induktsioonifaasi võrdseks nulliga, võime kirjutada:

Saadud magnetvälja magnetiline induktsioon määratakse nende kolme magnetinduktsiooni vektorsummaga.
Leiame saadud magnetinduktsiooni vektordiagrammide abil, konstrueerides need mitmeks ajahetkeks.
Joonistage vektorskeemid
Nagu diagrammidelt järeldub, pöörleb masina tekkiva magnetvälja magnetinduktsioon B, jäädes suuruselt muutumatuks. Seega tekitab kolmefaasiline staatori mähis masinas ringikujulise pöörleva magnetvälja. Magnetvälja pöörlemissuund sõltub faaside vaheldumise järjekorrast. Saadud magnetinduktsiooni suurus.
Magnetvälja pöörlemissagedus sõltub võrgu sagedusest ja magnetvälja pooluste paaride arvust.
, [rpm].
Sellisel juhul ei sõltu magnetvälja pöörlemissagedus asünkroonse masina töörežiimist ja selle koormusest.
Asünkroonse masina töö analüüsimisel kasutatakse sageli magnetvälja pöörlemiskiiruse ω0 mõistet, mille määrab seos:
![]() , [rad/sek].
, [rad/sek].
Magnetvälja ja rootor-raveli pöörlemissageduse võrdlemiseks nimetati koefitsienti libisemiseks ja tähistati tähega. Libedust saab mõõta suhtelistes ühikutes ja protsentides.
või ![]()
Protsessid asünkroonses masinas Staatori ahel
a) staatori EMF.
Staatorimähise tekitatud magnetväli pöörleb statsionaarse staatori suhtes teatud sagedusega ja kutsub staatorimähises esile EMF-i. Selle välja poolt indutseeritud EMF-i efektiivne väärtus staatori mähise ühes faasis määratakse avaldise abil:
kus: =0,92÷0,98 – mähise koefitsient;
– võrgu sagedus;
– staatorimähise ühe faasi keerdude arv;
– sellest tulenev magnetväli masinas.
b) Staatori mähise faasi elektrilise tasakaalu võrrand.
See võrrand on tehtud analoogia põhjal vahelduvvoolul töötava südamikuga mähisega.